The immersive, virtual and interactive 3D environment of Deep Space 8K as part of a gigantic scalable future project: As a VR research and development laboratory, the international research platform TUMCREATE offers impressive possibilities for presentation, collaboration and simulation for the development of a new infrastructure and mobility concept for the megacity of Singapore.
Over 100 scientists, researchers and engineers worked on a mobility concept for the future. Their vision is to integrate electric and autonomous mobility into the existing public transport network in Singapore to improve urban transportation. Six different research groups are each looking at specific aspects of mobility to achieve this. The ultimate public transport concept is intended to meet the increasing demand for mobility in the future. However, the development of this prototype is also intended to test the system’s potential for use in other megacities.
Interdisciplinary research on the international key project TUMCREATE requires a highly effective research platform in which experts from different fields – traffic engineers, computer scientists, electrical and mechanical engineers, and designers – achieve their goals. In efficient collaboration, simulations must be conducted there, the effects of operating strategies and movement patterns on the system must be evaluated, and user behavior must be analyzed. An interactive virtual research laboratory is the solution for these high demands: Combining TUMCREATE’s expertise in mobility and various state-of-the-art VR technologies, a unique research and demonstration platform was to be the project, while showcasing TUMCREATE’s innovative research excellence. The first version of this platform was developed by DAM and AIDA and is based on state-of-the-art visualization technology: it uses virtual reality with head-mounted displays (HMD), such as Oculus Rift, but also the globally unique VR technology of Deep Space 8K, which has already been developed and optimized by the Ars Electronica Futurelab for the Ars Electronica Center for many years.
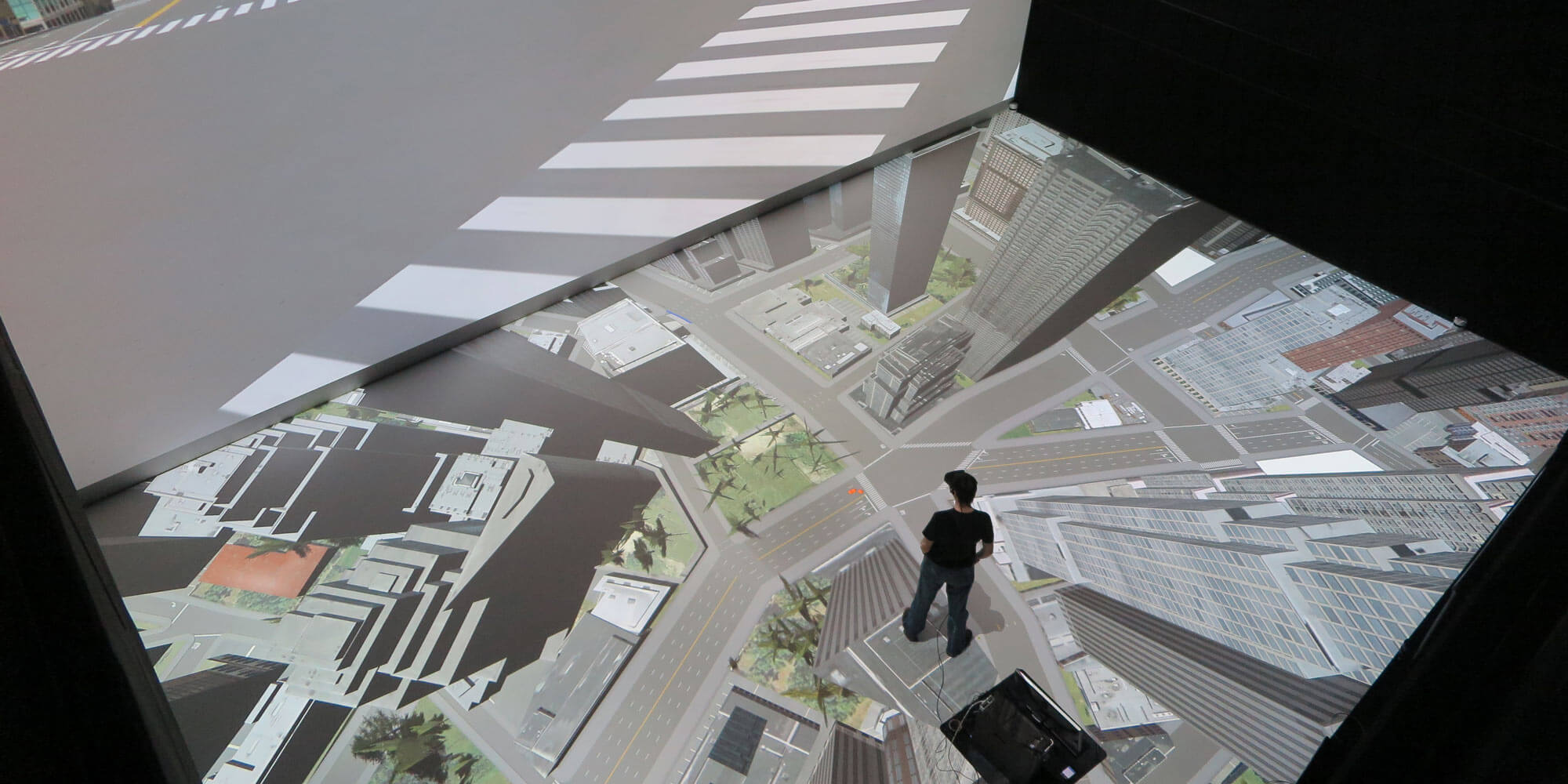
Photo: Ars Electronica Futurelab
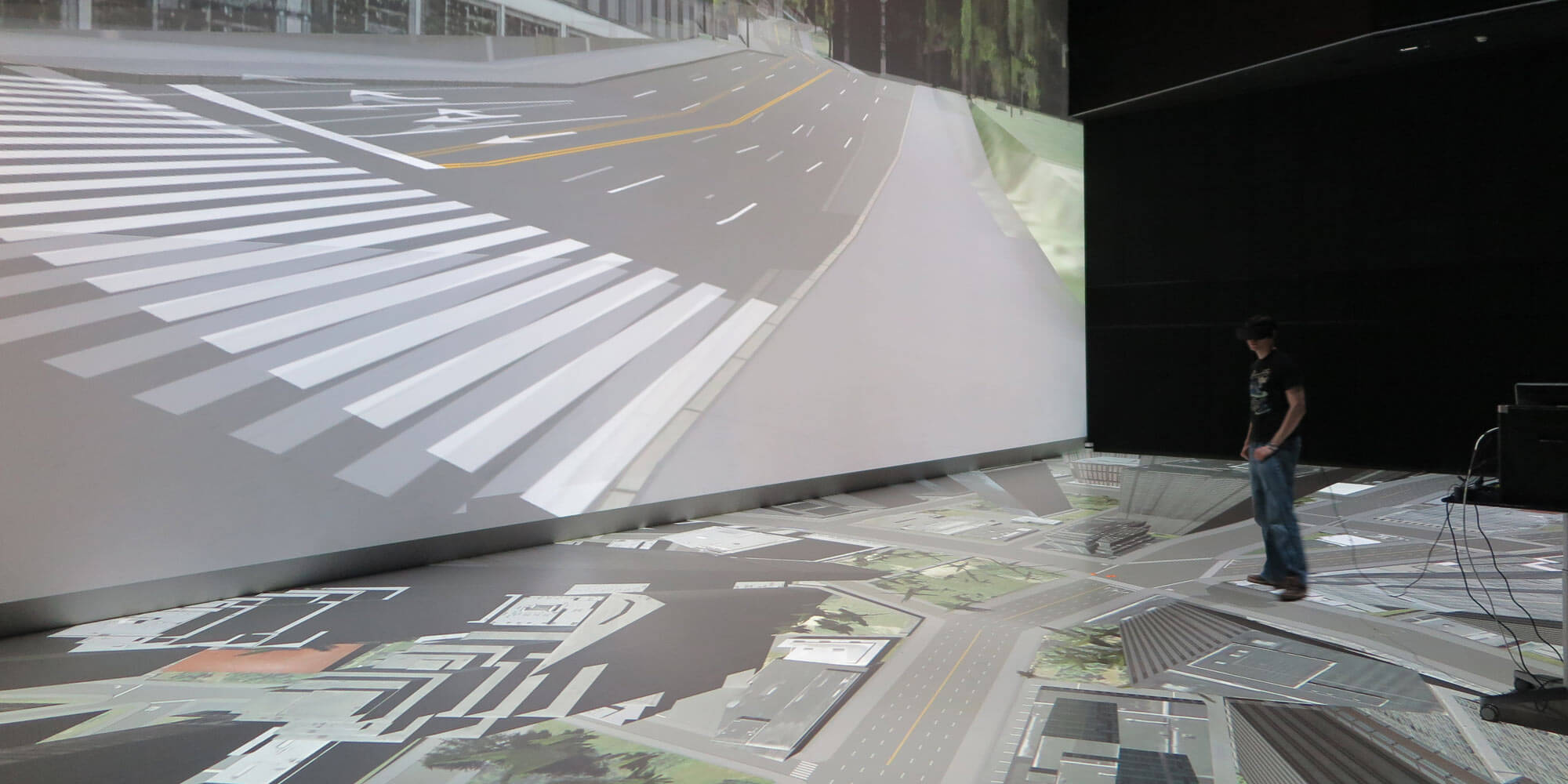
Photo: Ars Electronica Futurelab
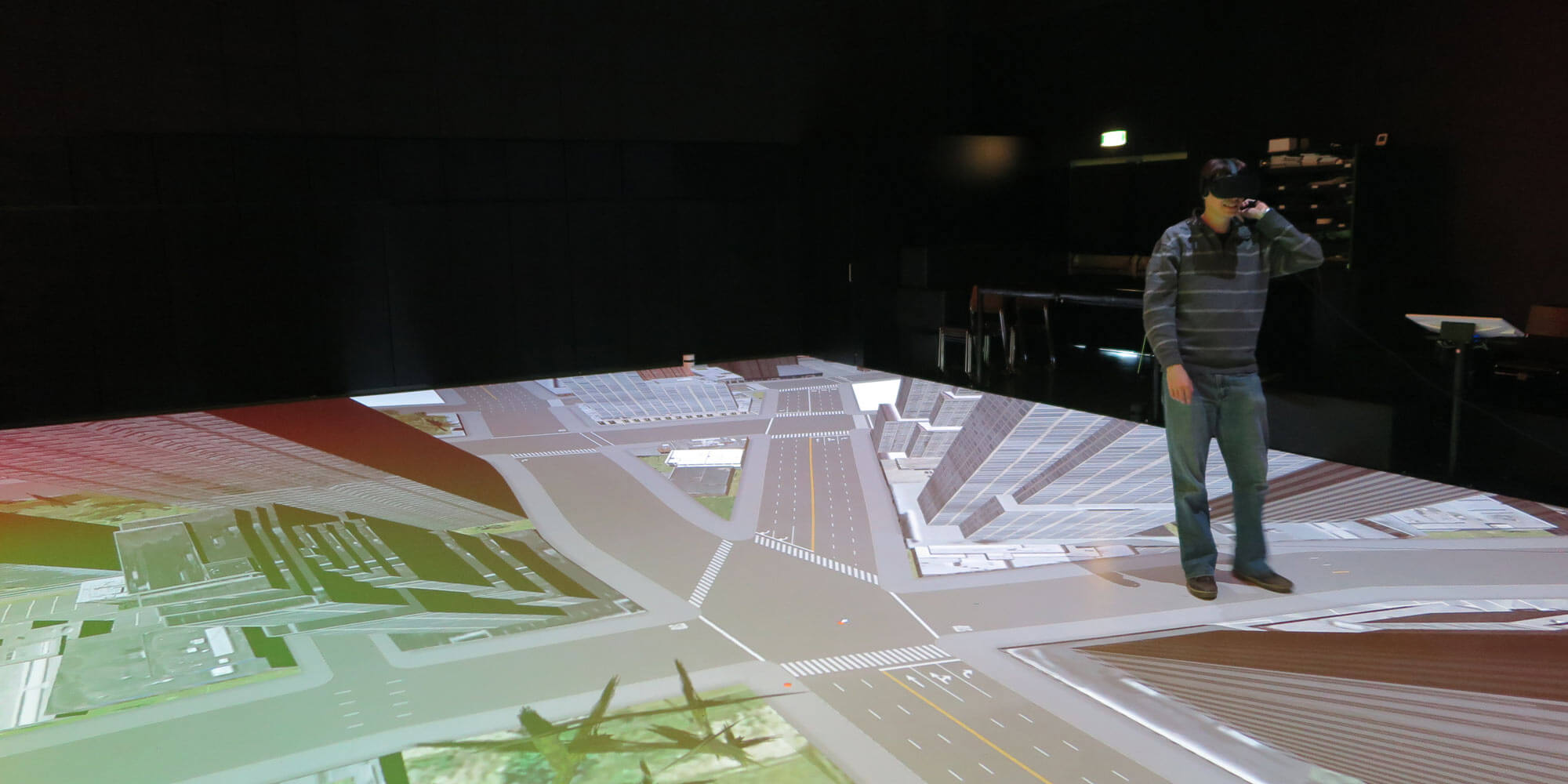
Photo: Ars Electronica Futurelab
Since its last significant upgrade, the promising Deep Space 8K prototype could now go into series production for science and research around the world. As a VR research and development lab, it not only enables impressive simulations in 3D. The study of new infrastructure and mobility concepts can take place here through human interaction with the VR visualization of stations, platforms and vehicle design. Scientists can thus pre-assess passenger boarding and alighting behavior, interaction between pedestrians and other road users, the effectiveness of information and guidance systems, and the social acceptance of the new technologies. In the immersive, virtual and responsive 3D environment of Deep Space 8K, it is also possible to observe how users react to a partly real, partly virtual vehicle. Their behavior is thus recorded, tested and verified.
The development of cost-intensive prototypes for real-life experiments could already be reduced to the essentials in many cases through VR experiments: Virtual experiments and the direct visualization of research progress in immersive projection not only facilitate research work and internal communication, they also serve as a spectacular presentation channel. Compared to traditional white papers and conferences – and even head-mounted VR displays – the immersive simulations in Deep Space 8K provide an immersive experience together with others, serving as a valuable platform for scientific discourse.
Credits
Ars Electronica Futurelab: Christopher Lindinger, Roland Haring, Clemens Scharfen, Johannes Pöll, Marianne Eisl, Martina Mara, Michael Mayr, Peter Freudling
Tumcreate: Prof. Alois Knoll, Prof. Fritz Frenkler, Dr. Suraj Nair, Rahul Gujarathi, Daniel Zehe, Goran Marinkovic, Jiajian Xiao, Pranjal Swarup, Yude Lee
Related Projects
Immerse yourself in our work
Interested in similar projects? The following Ars Electronica Futurelab projects are related to the ideas and concepts presented here. An overview of all our productions, cooperations and projects can be found in our project archive.