Tomohiro Tachi’s Lab (Tachi Lab) of The University of Tokyo and Futurelab collaborate through a residency program to exchange knowledge through practical hands-on prototyping of new origami robotics. The structured knowledge exchange will revolve around collaborative prototyping, combining expertise from Tachi Lab’s post-graduate students working in origami geometry and applied computational origami with the Futurelab’s fundamental research in the field of origami robotics. We question how to program, transform, and sense complex new origami structures. The residency will culminate in a series of functional studies and early-stage works that reflect new findings in rigid-origami geometry, material, fabrication, and robotics.
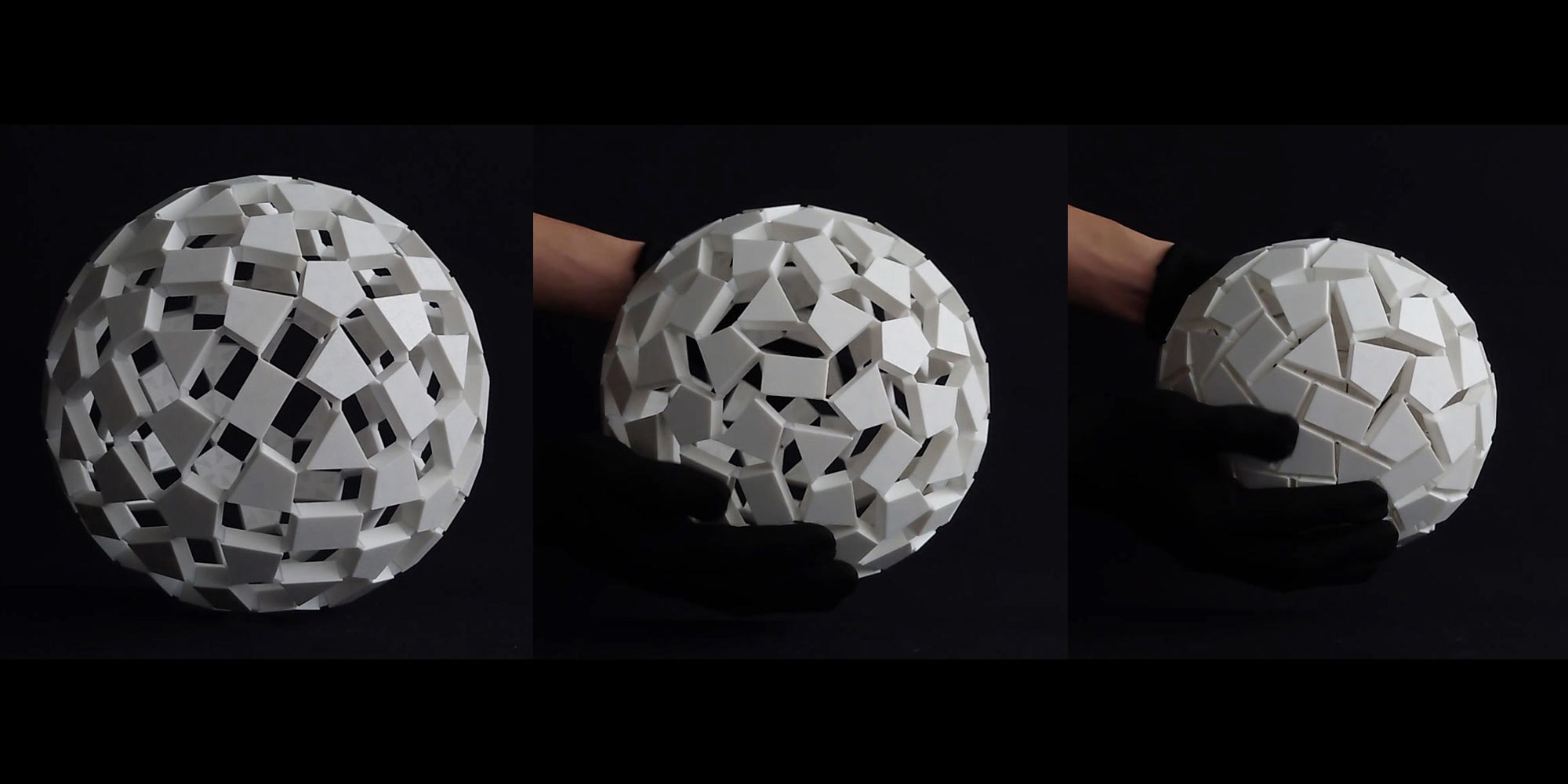
Folded Futures / Kanata Warisaya, Hiroki Minimi, Tachi Lab, Ars Electronica Futurelab - Photo: Kanata Warisaya
Exhibit
Folded Futures
Origami Robotics Residency
Kanata Warisaya (JP), Hiroki Minami (JP), Tachi Lab (JP), Ars Electronica Futurelab (AT)
POSTCITY, First Floor, Open Futurelab
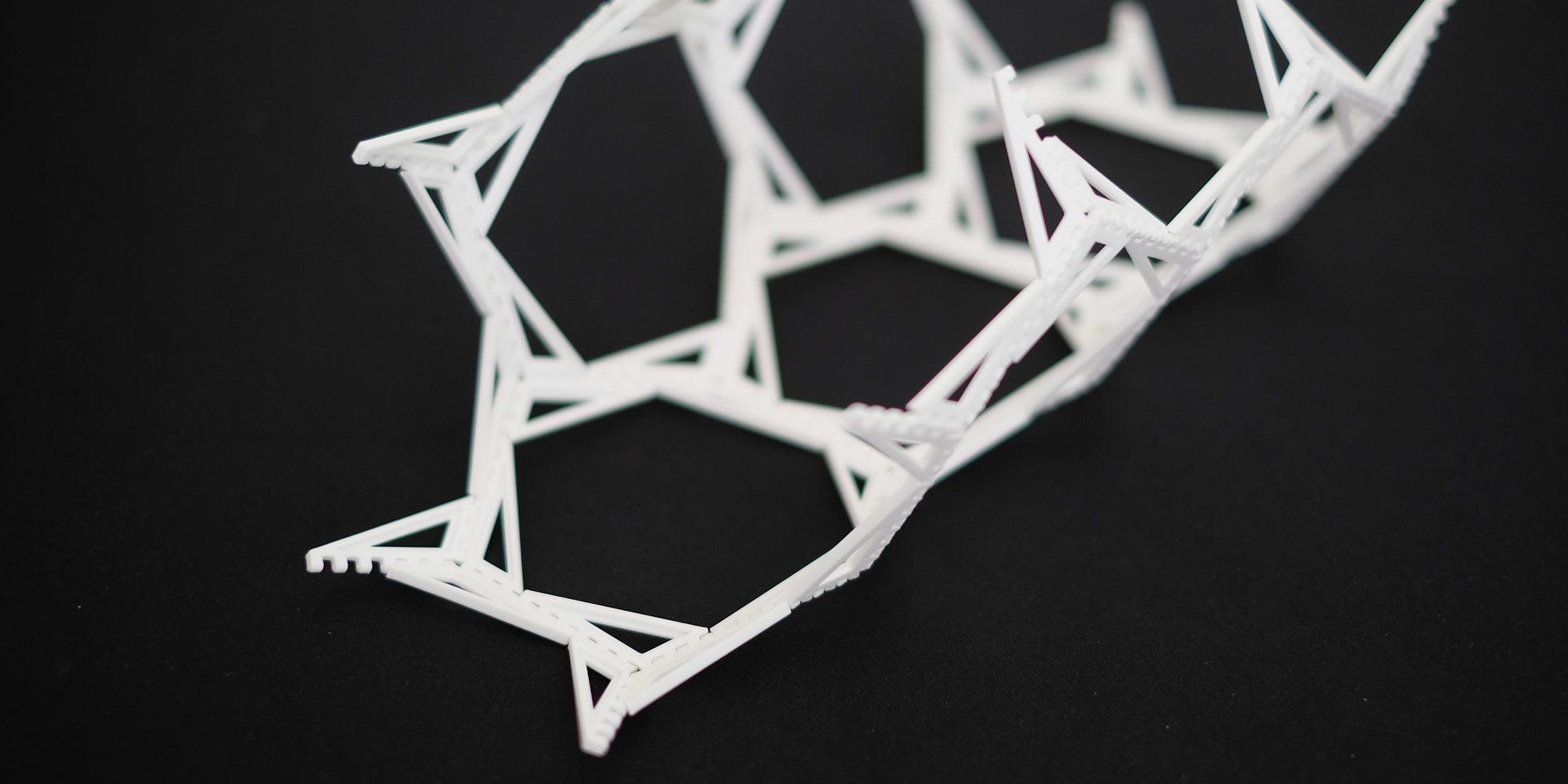
Folded Futures / Kanata Warisaya; Hiroki Minimi; Tachi Lab; Ars Electronica Futurelab - Photo: Hiroki Minami
-
About
Kanata Warisaya
Kanata Warisaya is a PhD student at TachiLab. His primary research interests are tessellation-based design and fabrication. He studies tessellation in art and nature and applies their principles to the design and modular construction of curved surfaces and mechanisms using computational geometry. His digitally fabricated physical models enable people to experience assembling and transforming them, which helps convey the concept of his research.
-

About
Hiroki Minami
Hiroki Minami is a Master's student at TachiLab. His primary research interest is in the design and fabrication of mechanisms based on the theory of rigid origami. He studies the kinematic principles of origami and linkage mechanisms, applying them to the design of new mechanisms through the combination of their patterns. His work explores diverse possibilities from simple principles, extending into both engineering and installation art, and demonstrating broad developmental potential.
-

About
Tachi Lab
TachiLab, Tomohiro Tachi’s group at The University of Tokyo, studies the relationship between form and function to make them designable. They begin by appreciating the shapes around us, then unravel them from the perspective of geometry and computational methods, aiming to realize novel kinematic and functional systems. Two main themes are "origami", the behaviors accompanying surface folding, and "tessellation", the geometry of modular systems with consistent connections.
Credits
Collaborating Artists: Hiroki Minami, Tomohiro Tachi, Kanata Warisaya Ars Electronica Futurelab: Alexandre Bezri, Matthew Gardiner, Simon Schmid, Anna Weiss Partner: Tachi Lab of The University of Tokyo This project is supported by grants JST ASPIRE JPMJAP2401, JST FOREST JPMJFR232T, JSPS KAKENHI 24H00821, and was funded in whole or in part by the Austrian Science Fund (FWF) [10.55776/AR590] PEEK Grant AR590 ORI*botics On the Art and Science of Origami and Robotics.