
Nomination
anna-schaeffner.com/Soft-Collision
Soft Collision (2024) looks at the potential of safe physical interaction by embracing collision rather than avoiding it. Through a deformable, pneumatic membrane that serves as a tangible interface to foster direct manipulation and live programming, making interactions more intuitive and inclusive. The collective efforts of the artist, performer, and technical specialists have been crucial in shaping this concept, to move beyond conventional industrial interaction protocols toward a more engaged and comprehensive mode of communication.

Photo: Michelle Mantel
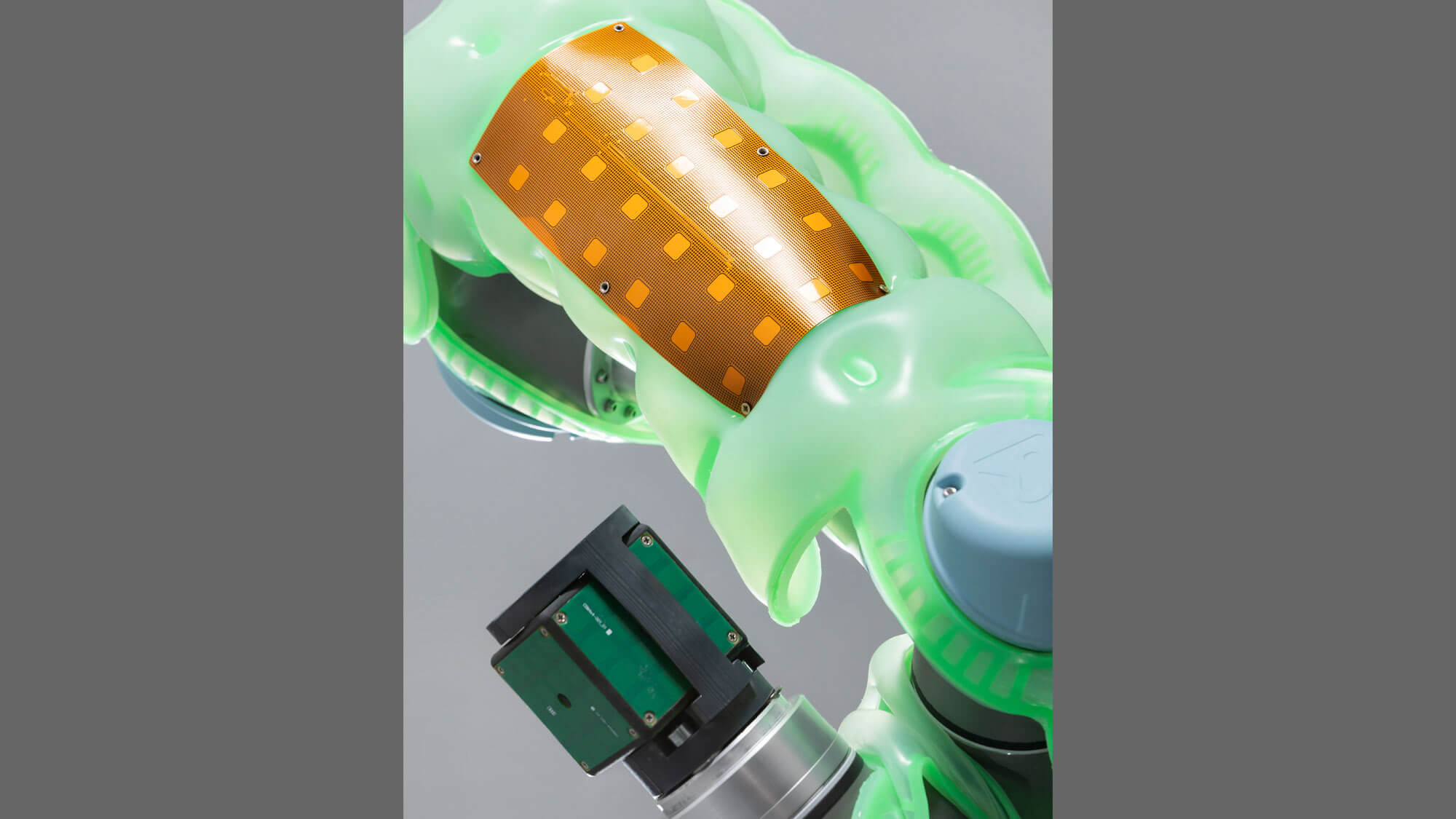
Photo: Michelle Mantel

Photo: Michelle Mantel
Through insights from five European experimental pilots, the membrane has evolved to serve specific functions, such as hosting flexible sensors for guiding robot movement or embedding air channels to soften interactions, thereby creating a more accommodating environment for human-robot interaction. Additionally, an active chamber within the membrane offers feedback, like direction indicators, to aid non-verbal communication and build trust. Drawing inspiration from the natural world and considering diverse biological movements and forms, it strives for a subtle shift in how we view and interact with robotic systems.
Credits
Artist: Anna Schaeffner
Performer: Michela Filzi
Artistic Video: Michelle Mantel
VOJEXT S+T+ARTS Art Residence 3: Social Robots
Residence lead by VOJEXT PARTNERS: Fondazione Istituto Italiano Di Tecnologica (IIT), Universdidad Politécnica de Madrid (UPM), Universidad Nebrija (UNNE) and WAAG
This project has received funding from the European Union’s Horizon 2020 research and innovation program under the Grant Agreement no.952197
With support from: The Cluster of Excellence “Matters of Activity. Image Space Material” Berlin
Biography
Anna Schaeffner (FR) is an Interaction designer, exploring the field of human-computer interaction, through a practice-based PhD at École nationale supérieure des Arts Décoratifs in Paris, France, and at the Cluster of Excellence ‘Matters of Activity’ in Berlin, Germany. Her research centers on soft robotics and the design of deformation as a vehicle for movement, dynamic material adaptation, and expressiveness. Through her design practice, she investigates hybrid forms of interaction to enhance the connection between robotic objects and their environments.