This project investigates the intersection of origami theory and robotics through computationally generated, multi-dimensional structures, culminating in a series of artworks that explore the geometric, aesthetic, and conceptual potential of rigid origami.
The Futurelab’s FWF PEEK funded project on Origami and Robotics (2021–2025) draws deeply from ongoing research in the origami engineering community. Each scientific advance inspires and expands our artistic exploration, opening new creative possibilities. A prime example is recent work in rigid origami theory by Luca Zimmermann, which enabled the Futurelab-Team led by Matthew Gardiner to realise the Gigantic Oribotic Spiral (2024) as a mechanically rigid-foldable structure.
His theory provides a way to mathematically define a minimal parametric design space based on the angles in a crease pattern and to calculate its folding and unfolding precisely. Changing the angles changes the geometric behaviour of the spiral, lending each variation a unique character, aesthetic, and folding morphology.

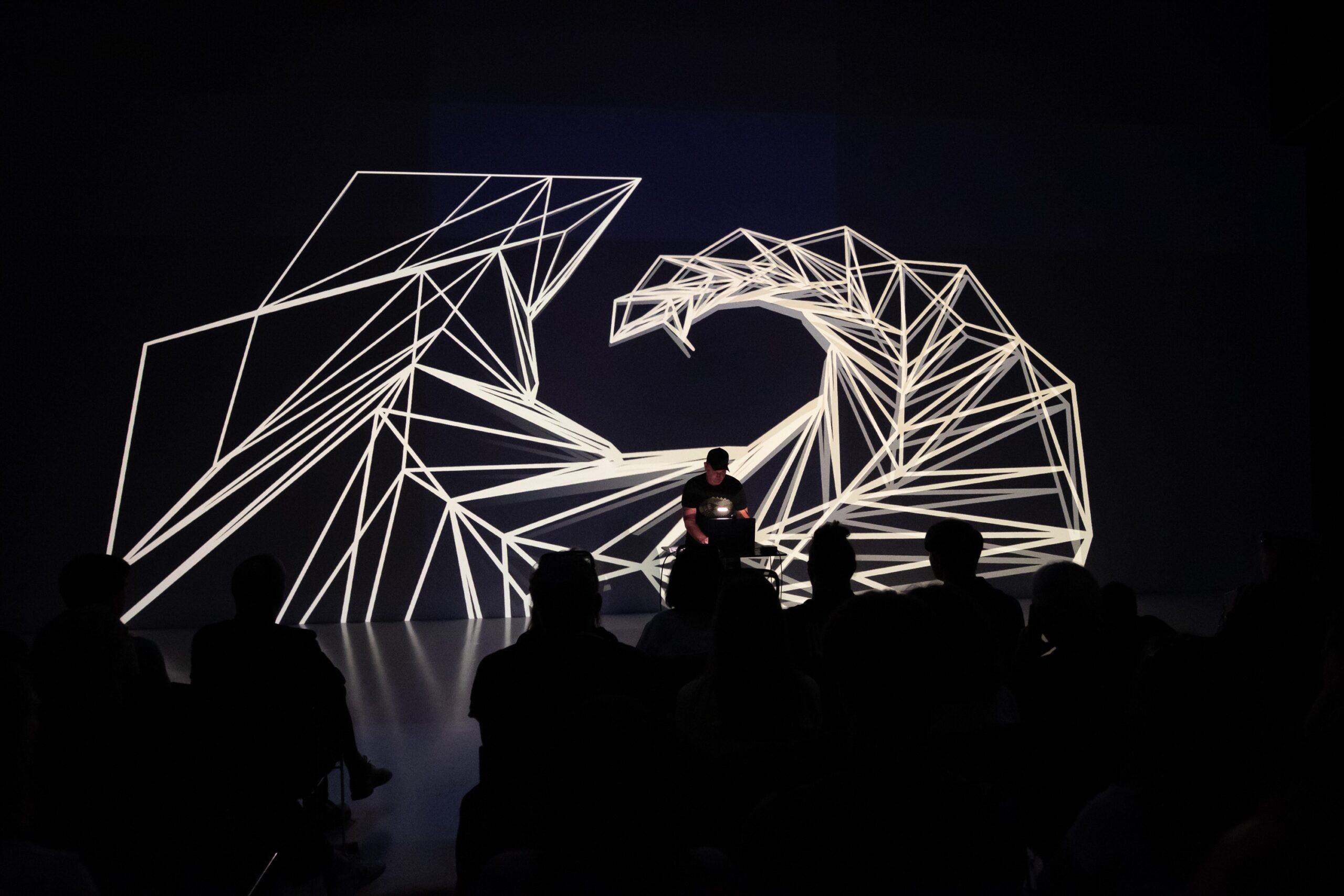
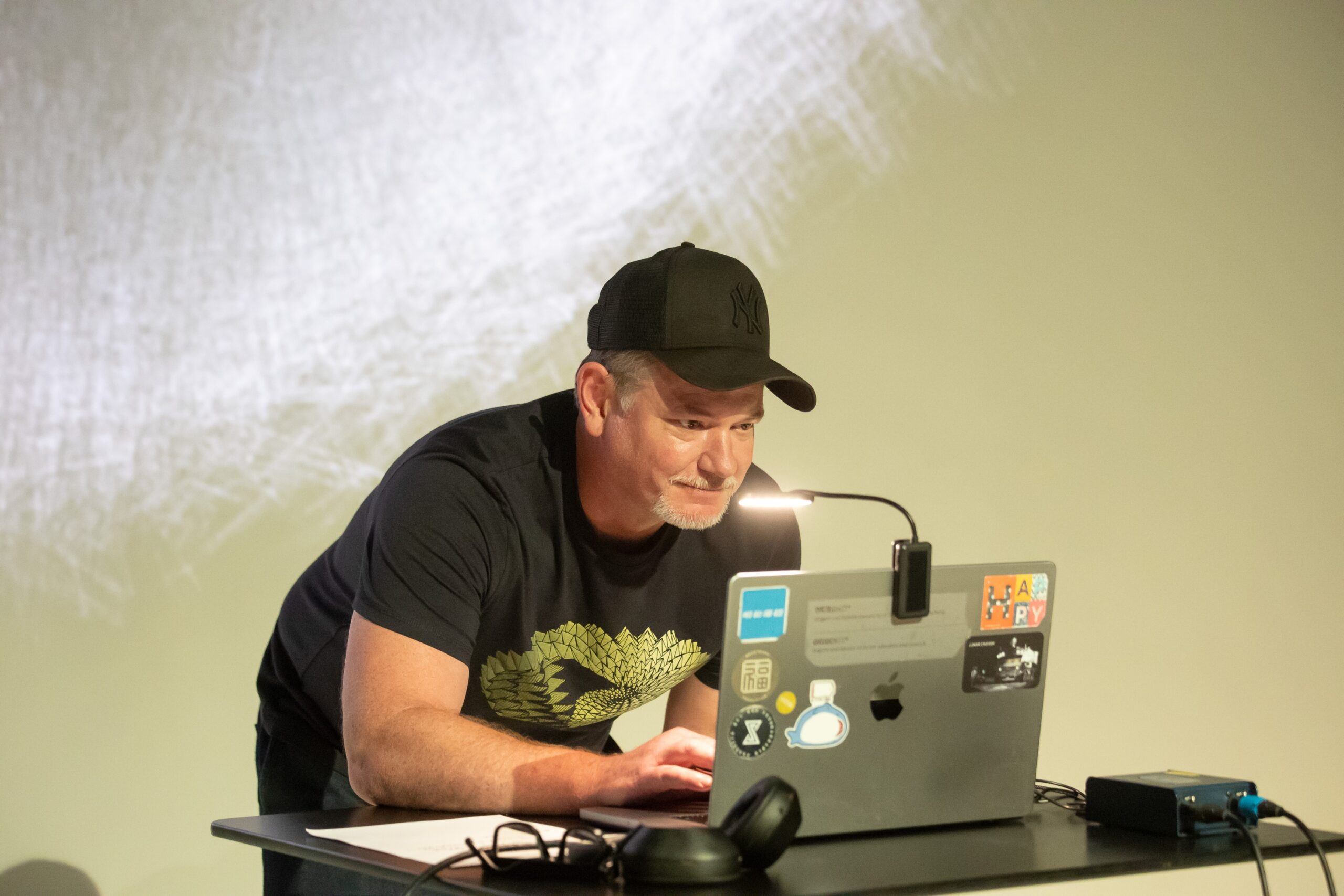
Presentation of Oribotics [n-dimensional] @ Open Futurelab 2025; photo: Bettina Gangl

Presentation of Oribotics [n-dimensional] @ Open Futurelab 2025; photo: Bettina Gangl

Presentation of Oribotics [n-dimensional] @ Open Futurelab 2025; photo: tom mesic

Presentation of Oribotics [n-dimensional] @ Open Futurelab 2025; photo: tom mesic
Presentation of Oribotics [n-dimensional] @ Futurelab Night 2025; photo: tom mesic
Presentation of Oribotics [n-dimensional] @ Futurelab Night 2025; photo: tom mesic
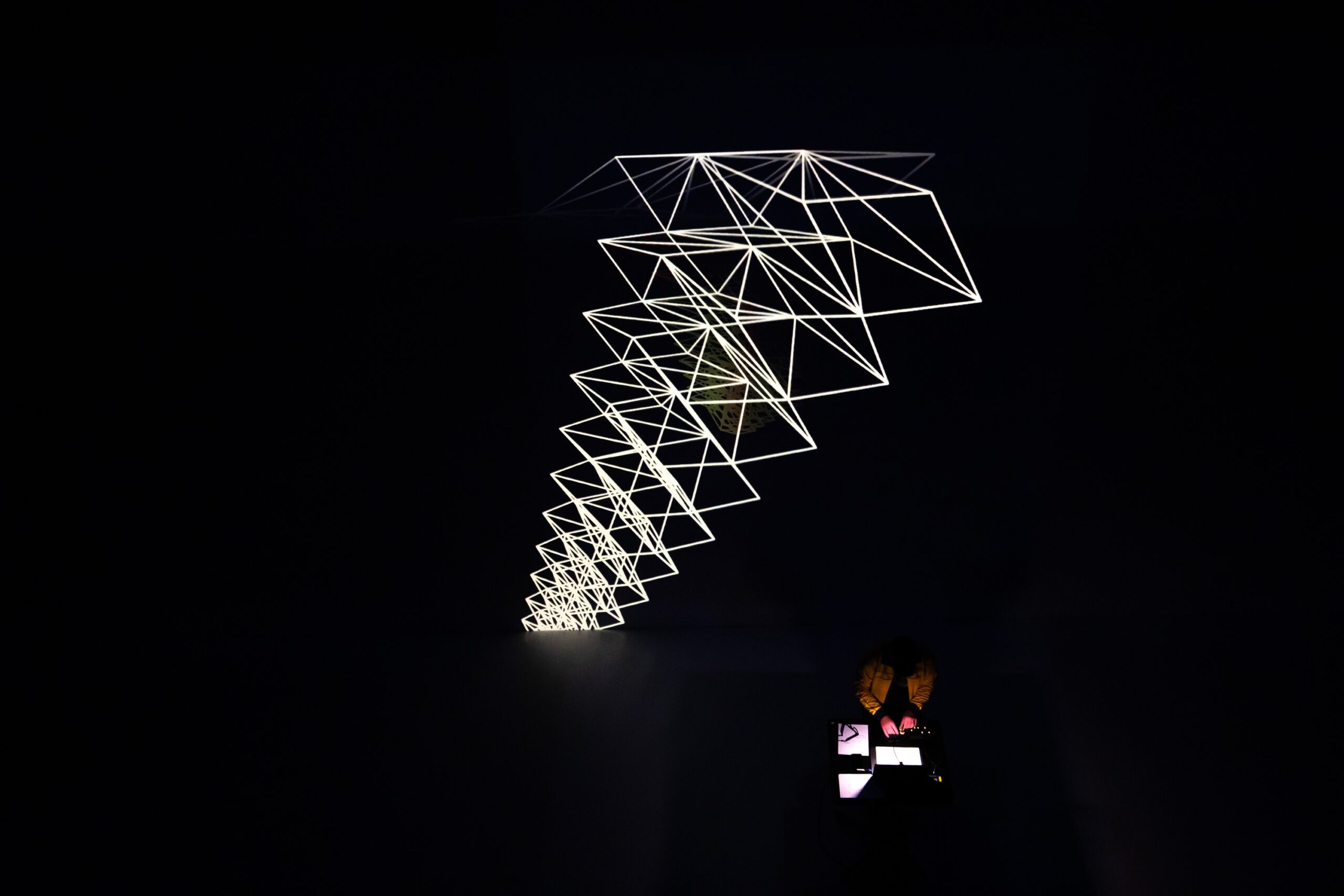
Presentation of Oribotics [n-dimensional] @ Futurelab Night 2025; photo: tom mesic
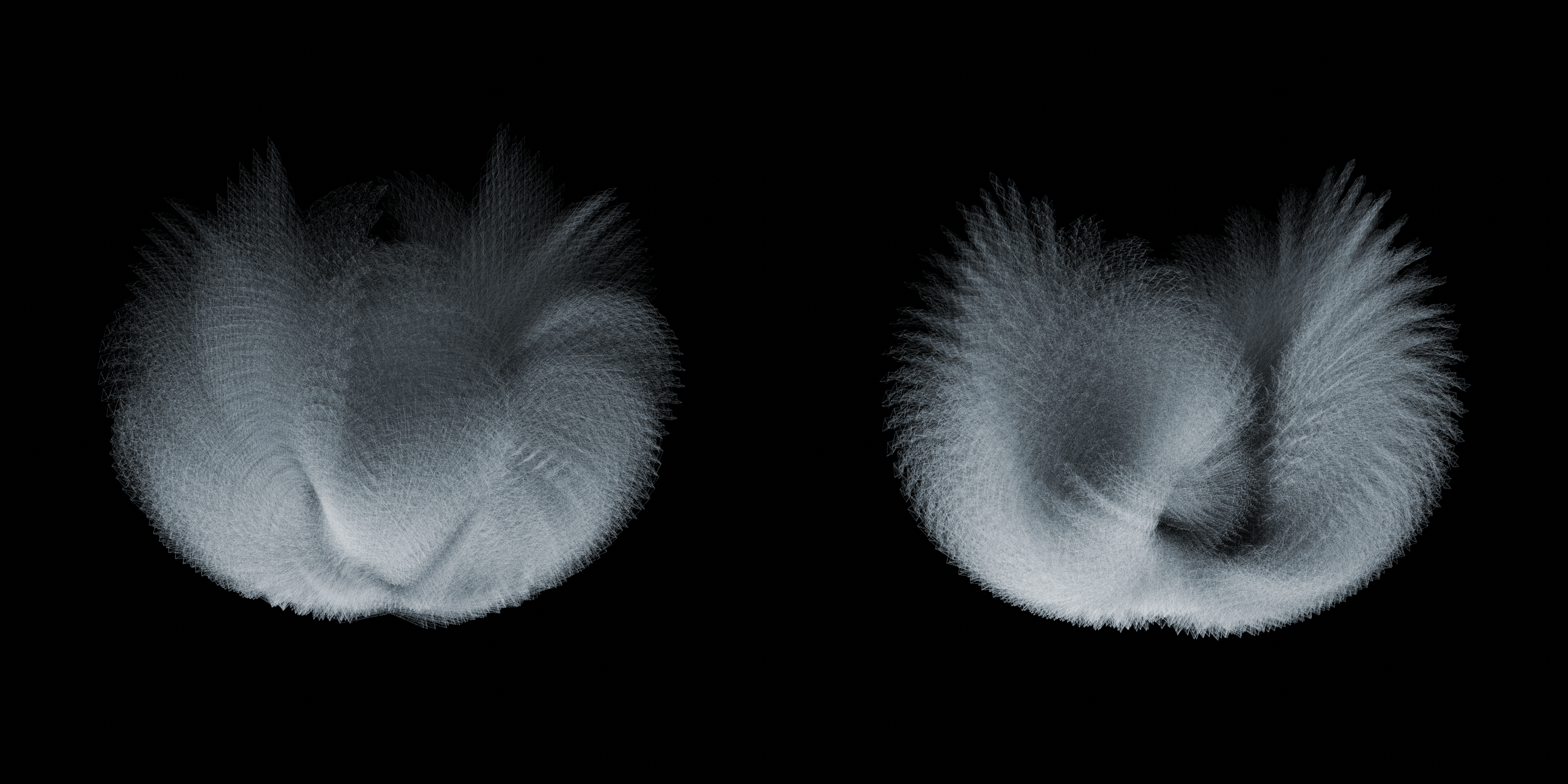
Oribotic n-dimensional spiral; image: Matthew-Gardiner

Gigantic Oribotic Spiral@ Open Futurelab 2024; photo: Bettina Gangl

Gigantic Oribotic Spiral@ Open Futurelab 2024; photo: tom mesic

Gigantic Oribotic Spiral@ Open Futurelab 2024; photo: Bettina Gangl
The initial Futurelab model let us explore these variations one at a time, a method we used to choose geometry for large-scale fabrication. But conceptually and computationally, we began to wonder: there’s an infinite number of variations, each one of them valid rigid origami. Could we see the entire parametric design space—every variation—all at once?
The team soon found that calculating the infinite problem space is a future challenge, perhaps for quantum computing, but what we can do is approximate it as a discrete dataset. Our n-dimensional origami represents a computationally generated geometric dataset that spans three spatial dimensions, time, and three angular dimensions. To create experience, the dataset requires interpretation, leading to a series of new artworks that explore the n-dimensionality of origami. Each work is a slice from the infinite realm of possibility, synthesising various findings from our investigation into the core research questions (program, transform, sense).
This project is part of the Open Futurelab at the Ars Electronica Festival 2025.
Credits
Ars Electronica Futurelab: Alexandre Bizri, Matthew Gardiner, Simon Schmid, Anna Weiss
In collaboration with: ORIKIN, Luca Zimmermann
This research was funded in whole or in part by the Austrian Science Fund (FWF) [10.55776/AR590] PEEK Grant AR590 ORI*botics On the Art and Science of Origami and Robotics.