
ORI*BOTICS, the art and science of robotic origami, is a follow-on research project that continues the investigation of origami, technology and nature. It extends on our novel methods for designing and making strong, flexible and highly irregular origami from textiles and 3D printing, namely Fold Printing and Fold Mapping.
This research asks questions specific to robotic origami and folded mechanisms, a new area in art and science with many open questions. Our aim is to extend knowledge from literature, including new ideas in science, to develop new approaches and create practical tools and know-how for the studio.
We investigate three fundamental problem areas: program, transform and sense.
- The programming of origami shapes needs the understanding of theoretical, practical and computational knowledge of how origami patterns are formed in nature and how they can change shape. We aim to make new software to allow an artist to create new robotics origami designs. We will an open-source, open-call methodology to create and collate new and existing tools for computational origami.
- Transforming a robotic origami shape requires intelligent materials and complex digital fabrication techniques. Our experimental approach aims to combine current knowledge into new processes for artists and scientists to make and move their origami robots. We want to find methods that can be used to move a fold, in a repeatable, durable way, that are suitable for studio-based production.
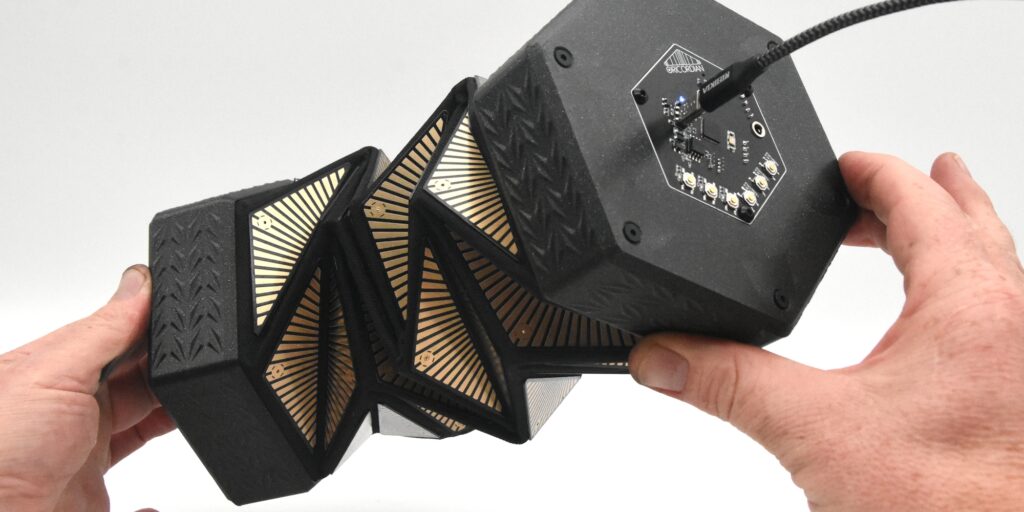
- Sensing in origami offers continuous and binary sensing options that can create many different types of human interactions, such as sculptural, musical and peformance-based prototypes. We are looking for a multi-material solution, based on existing methods, that can combine flexibility and electrical properties on complex origami patterns.


The research methodology is built around four categories:
- Art Into Science: our process of literature review and experimental validations.
- Research Through Making: production of prototypes and novel methods, such as haptic, tactile and physical prototypes. These are treated with the same importance as conceptual frameworks and academic publications.
- Open-Source & Open Call: to bring together expertise from other world-leading researchers.
- Research Through Teaching: including workshops, public presentations, exhibitions, online videos and peer reviewed publications.
The presentation of our results of hands-on, haptic, tactile and physical prototypes are treated with the same importance as conceptual frameworks, literature reviews and publications. Public presentations and engagement are gained through exhibitions, workshops and online videos.
The research is conducted at the Ars Electronica Futurelab in Linz. Public outreach programs are in collaboration with the Ars Electronica Festival and Centre. A team with artistic and scientific expertise is led by oriboticist Matthew Gardiner.
Credits
Team:
Project Key Researcher and Lead: Matthew Gardiner
Project researchers: Anna Weiss, Erwin Reitböck, Simon Schmid
Former researchers: Arno Deutschbauer, Georgios Tsampounaris
Project Advisor: Hideaki Ogawa
Partners:
Funded through the FWF Austrian Science Fund, PEEK Program.
Studio Matthew Gardiner https://orilab.art