Robotics
-
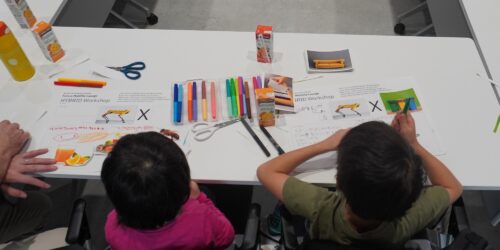
Future Mobility Lounge
Discovering Fresh Ideas with Robot Spot
The talk and workshop event Future Mobility Lounge in Yokohama, Japan, focused on future mobility and sustainability. Visitors from elementary school children to adults were invited to find inspiration with artistic and cultural input and conceptualize new mobility ideas involving Robot Spot.
-

OutReach
Physical Interaction for Telepresence Robots
OutReach is a solution that plays to the strengths of telepresence robots. By adding remotely controlled actuators to light switches, elevator buttons, or any other controls in a given environment, OutReach provides a way of interaction with the remote surroundings.
-

CoBot Studio
As humans and robots work together ever more closely, their joint success is linked to certain preconditions: How do you create safe working environments? How can we increase the acceptance of robots in everyday work? And how do you communicate with a colleague who consists only of a gripper arm?
-

pinocchio
Two industrial robots play the role of two marionettes. The motions of a human puppeteer were recorded and are copied by the two robot arms. What happens when we are able to digitalize and therefore replicate highly complicated human abilities such as puppetry?
-

Robotinity Exhibition
Human beings have been developing machines for thousands of years. But what drives us on to do so? Is it the urge to understand and recreate nature and its processes? Is it perhaps our audacious pretensions to be capable of improving on the world as it is? Or are we just curious?
-

Human Robot Harmony
Research with Humanoid Robot Honda ASIMO
The Ars Electronica Futurelab and Honda R&D worked together to research the next generation of the relationship between humans and robots – with the humanoid robot Honda ASIMO at the center.
-

RoboLab
The heart piece of the first main exhibition “New Views of Humankind” in 2009 was constituted by four public accessible labs.
-

Geminoid Research Collaboration
How can a person’s unique personality and essential character traits be captured, simulated and imparted to a robot?