
Soft Collision (2024) looks at the potential of safe physical interaction by embracing collision rather than avoiding it. A deformable, pneumatic membrane which serves as a tangible interface to foster direct manipulation and live programming makes interactions more intuitive and inclusive. The intensive collaboration between the artist and technical partners has been crucial in moving beyond conventional industrial interaction protocols toward a more material-driven form of robotics.
Through insights gained from five European experimental pilots involving industrial robots in specific contexts the project Soft Collision developed a membrane that has evolved to serve distinct different functions. It hosts flexible sensors for programming the robot’s movements through direct manipulation and live adjustments. The morphology of the air channels enhances affordance and ensures humans feel safe around the robot. The membrane is designed to follow the complex torsional movements of the robot’s six axes of freedom.

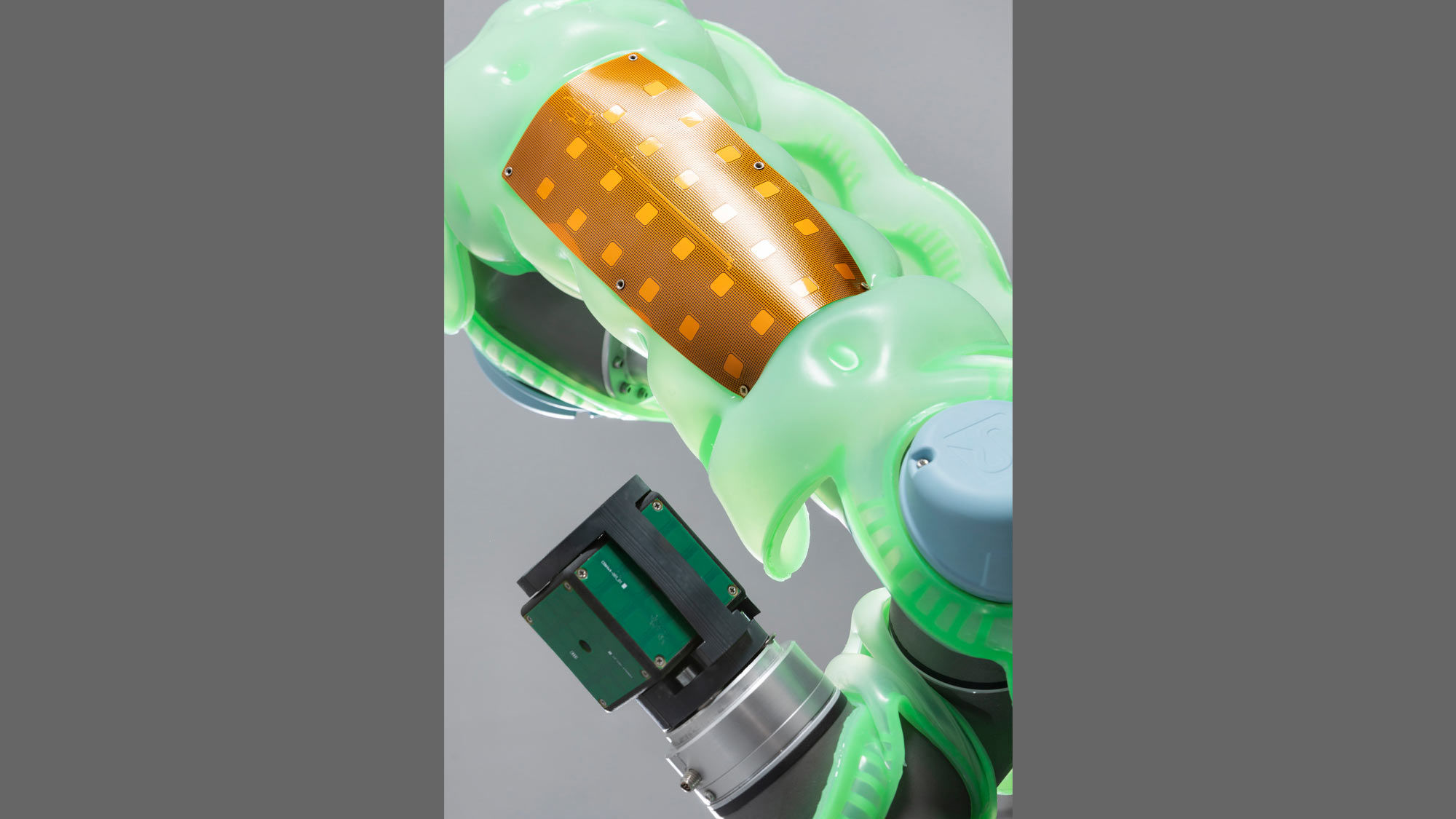
Soft Collision, Membrane placed on UR5, photo: Michelle Mantel
Soft Collision, photo: Michelle Mantel

Soft Collision, Performance with the membrane, photo: Michelle Mantel
Its flexible material allows the robot to adapt seamlessly when colliding with the physical environment. Two additional air chambers at the base of the membrane activate with brief bursts, serving as a form of non-verbal communication to provide feedback on the inputs received.
Drawing inspiration from the natural world and diverse biological movements, such as those of caterpillars, this design strives for a subtle shift in how we view and interact with robots.
Bio
-
 Photo: Michelle Mantel
Photo: Michelle MantelAnna Schaeffner
FR
Anna Schaeffner (FR) is an interaction designer exploring the field of human-computer interaction through a practice-based PhD at École nationale supérieure des Arts Décoratifs in Paris and the Cluster of Excellence »Matters of Activity« in Berlin. Her research centers on the design of deformable materials. Through her design practice, she investigates tangible interaction as a vehicle for movement programming, dynamic material adaptation, and expressiveness.
Credits
Artist: Anna Schaeffner
Performer: Michela Filzi
VOJEXT S+T+ARTS Art Residence 3: Social Robots
Residence lead by VOJEXT PARTNERS: Fondazione Istituto Italiano Di Tecnologica (IIT), Universdidad Politécnica de Madrid (UPM), Universidad Nebrija (UNNE) and WAAG
The UR5 is kindly provided by Grand Garage, an education and innovation workshop for people, knowledge, and technology, located in the Tabakfabrik Linz. The GRAND GARAGE is part of TGW Future Wings, the social entrepreneurship division within the TGW world.
This project has received funding from the European Union’s Horizon 2020 research and innovation program under the Grant Agreement no.952197. Supported by The Cluster of Excellence »Matters of Activity. Image Space Material« Berlin.
Presented in the context of the LABEL4FUTURE project. LABEL4FUTURE is funded by the European Union (European Innovation Council and SMEs Executive Agency (EISMEA) under grant agreement No. 101133162).