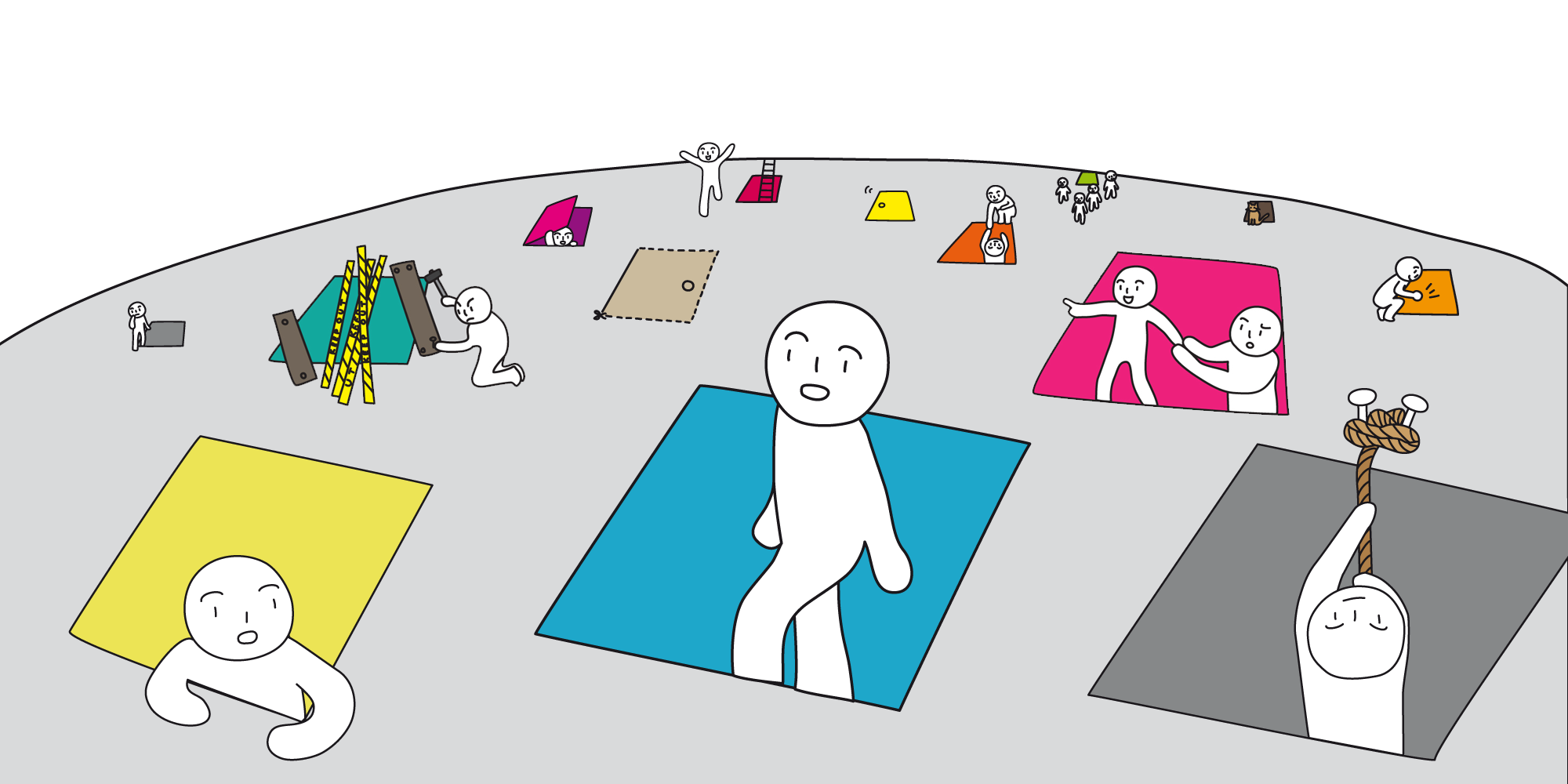
Aerial-Biped is a prototype for exploring a new experience with a physical biped robot. In this work using a quadrotor, we aim to separate the body shape and motion design.