How to make a quadruped robot more autonomous with a new sense of sight
Sehen bildet als wichtigster Sinn des Menschen die Grundlage zur Erfassung der Umgebung, was Voraussetzung für ein sicheres Bewegen oder Navigieren von Vehikeln und autonomen Maschinen ist. Sehen mit Licht unterliegt allerdings Einschränkungen durch Nebel, Staub, Hindernissen, Wänden, etc. oder allgemein ausgedrückt, durch Medien, die von elektromagnetischen Wellen aus dem sichtbaren Teil des Spektrums nicht durchdrungen werden können. Während Mikro- bzw. Millimeterwellen ebenfalls eine Wahrnehmung der Umgebung erlauben und zahlreiche Hindernisse gefahrlos durchdringen können, ist die Auflösung eines Radarbildes stark limitiert und farblos.

Photo showing the Project „Magic Eye“ by Andreas Stelzer (AT) Institute for Communications Engineering and RF-Systems JKU, Andreas Müller (DE) Institute of Robotics JKU, Reinhard Feger (AT), Hubert Gattringer (AT), Masoud Farhadi (IR), Robert Sturmlechner (AT), Richard Hüttner (AT) – all JKU – at the Ars Electronica Festival 2021. Credit: vog.photo

Magic Eye, Andreas Stelzer (AT) Institute for Communications Engineering and RF-Systems JKU, Andreas Müller (DE) Institute of Robotics JKU, Reinhard Feger (AT), Hubert Gattringer (AT), Masoud Farhadi (IR), Robert Sturmlechner (AT), Richard Hüttner (AT) all JKU , Credits: Spot Wireless
Magic Eye, Credits: Andreas Stelzer (AT) Institute for Communications Engineering and RF-Systems JKU
ZurückWeiter
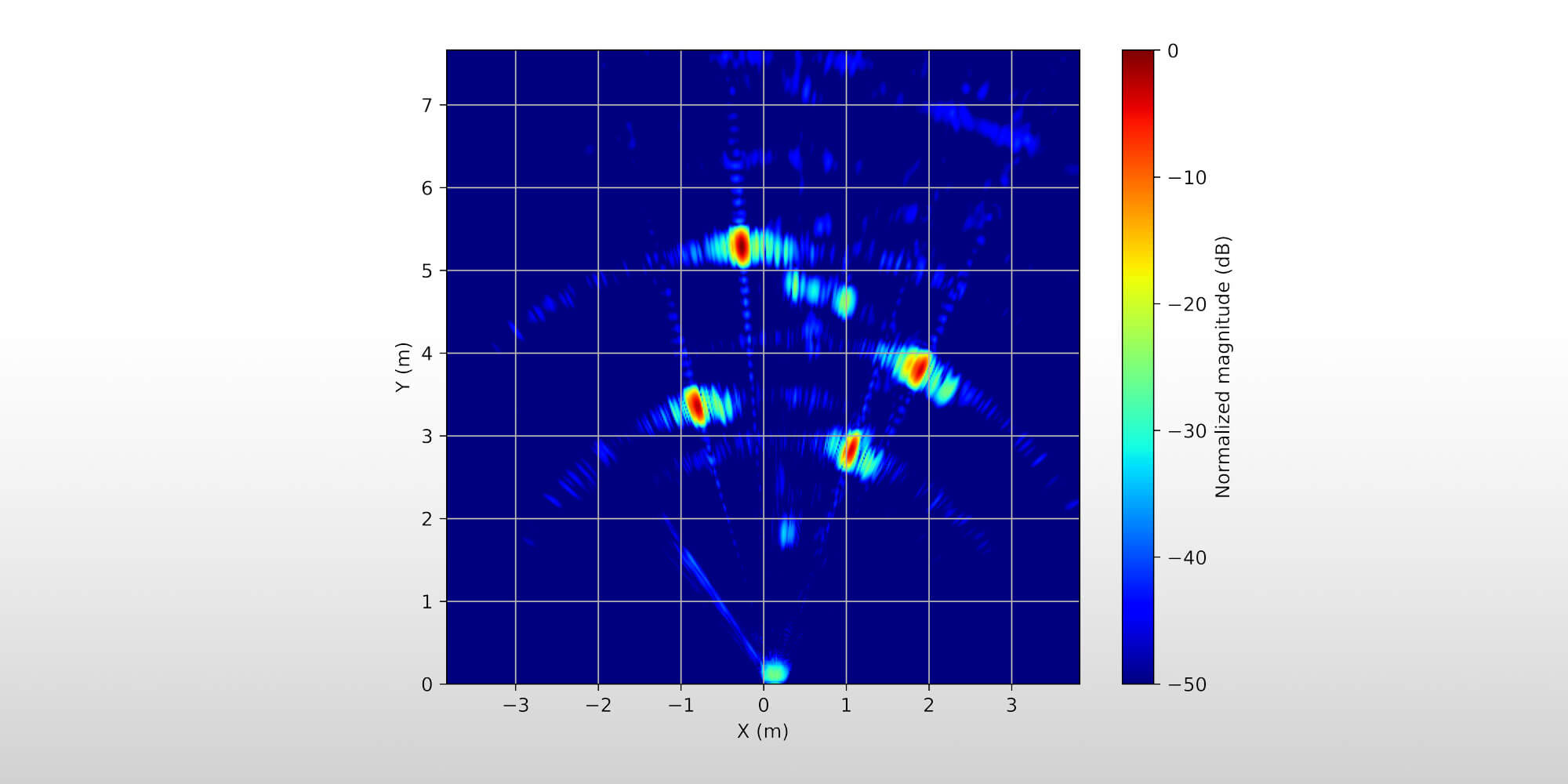
Im Projekt Magic-Eye wird die koordinierte Bewegung eines vierbeinigen Roboters symbiotisch mit der Messung von Millimeterwellenreflexionen kombiniert, um Hindernisse und versteckte Objekte zu detektieren. Mittels mathematischer Transformationen und Fusion der Daten entsteht ein signifikant höher aufgelöstes Abbild der Umgebung infolge der durch die Bewegung aufgespannten virtuellen Apertur, aus der sich auch der Name SAR (Synthetic Aperture Radar) ableitet. In Verbindung mit hochintegrierten Radarsensoren ist zu erwarten, dass SAR als Symbiose aus Messung und Bewegung zukünftig eine bedeutende Rolle bei der radarbasierten Pfadplanung und Kartengenerierung für das hochautomatisierte Fahren spielen wird.
Andreas Stelzer: Andreas Stelzer promovierte ‘sub auspiciis’ an der JKU Linz und forscht im Bereich Hochfrequenztechnik und hochintegrierter Radarsensorik. Er leitete ein Christian Doppler Labor für integrierte Radarsensoren und ist federführend am JKU-LIT-SAL mm-Wave RF-Technologies Lab beteiligt.
Andreas Müller: ist derzeit Professor für Robotik an der Johannes Kepler Universität, Linz, Österreich. Seine aktuellen Forschungsinteressen umfassen ganzheitliche Modellierung, modellbasierte und optimale Steuerung von mechatronischen Systemen, redundante Robotersysteme, parallele kinematische Maschinen, Biomechanik und Computational Dynamics.
Reinhard Feger: ist außerordentlicher Professor am Department für HF-Technik, JKU. Er liebt es, Radarsysteme zu entwickeln und sie dann an allen möglichen Dingen zu montieren, besonders wenn sie fliegen, fahren oder gehen.
Hubert Gattringer: ist ein außerordentlicher Professor am Institut für Robotik, JKU. Seine Forschungsinteressen umfassen die Modellierung und Steuerung von flexiblen Link/Gelenk-Robotersystemen und Laufmaschinen, optimale Bahnplanung und kinematisch redundante Industrieroboter.
Masoud Farhadi: Masoud Farhadi arbeitet an seiner Promotion über Radare mit synthetischer Apertur für hochautomatisiertes Fahren am Department für RF-Systeme der JKU.
Robert Sturmlechner: ist derzeit wissenschaftlicher Mitarbeiter am Institut für Robotik, JKU. Seine Hauptforschungsinteressen umfassen Kinematik, Dynamik und Trajektorienplanung für autonome Bodenfahrzeuge.
Richard Hüttner: ist Techniker am Institut für RF-Systeme und an den mechanischen und elektrischen Aspekten des Demonstratoraufbaus beteiligt.
Credits
Project partners are the Institute for Communications Engineering and RF-Systems, Department RF-Systems (Prof. Stelzer), (www.nthfs.jku.at), and the Institute of Robotics (Prof. Müller), (www.jku.at/institut-fuer-robotik), and the JKU spin-off INRAS (www.inras.at).


