How to make a quadruped robot more autonomous with a new sense of sight
Seeing, as the most important human sense, forms the basis for capturing the environment, which is a prerequisite for safe movement or the navigation of vehicles and autonomous machines. However, seeing with light is restricted by fog, dust, obstacles, walls or, generally speaking, by media that cannot be penetrated by electromagnetic waves from the visible part of the spectrum. While micro- and millimeter-waves also allow perception of the environment and can safely penetrate numerous obstacles, the resolution of a radar image is very limited and colorless.

Photo showing the Project “Magic Eye” by Andreas Stelzer (AT) Institute for Communications Engineering and RF-Systems JKU, Andreas Müller (DE) Institute of Robotics JKU, Reinhard Feger (AT), Hubert Gattringer (AT), Masoud Farhadi (IR), Robert Sturmlechner (AT), Richard Hüttner (AT) – all JKU – at the Ars Electronica Festival 2021. Credit: vog.photo

Magic Eye, Andreas Stelzer (AT) Institute for Communications Engineering and RF-Systems JKU, Andreas Müller (DE) Institute of Robotics JKU, Reinhard Feger (AT), Hubert Gattringer (AT), Masoud Farhadi (IR), Robert Sturmlechner (AT), Richard Hüttner (AT) all JKU , Credits: Spot Wireless
Magic Eye, Credits: Andreas Stelzer (AT) Institute for Communications Engineering and RF-Systems JKU
ZurückWeiter
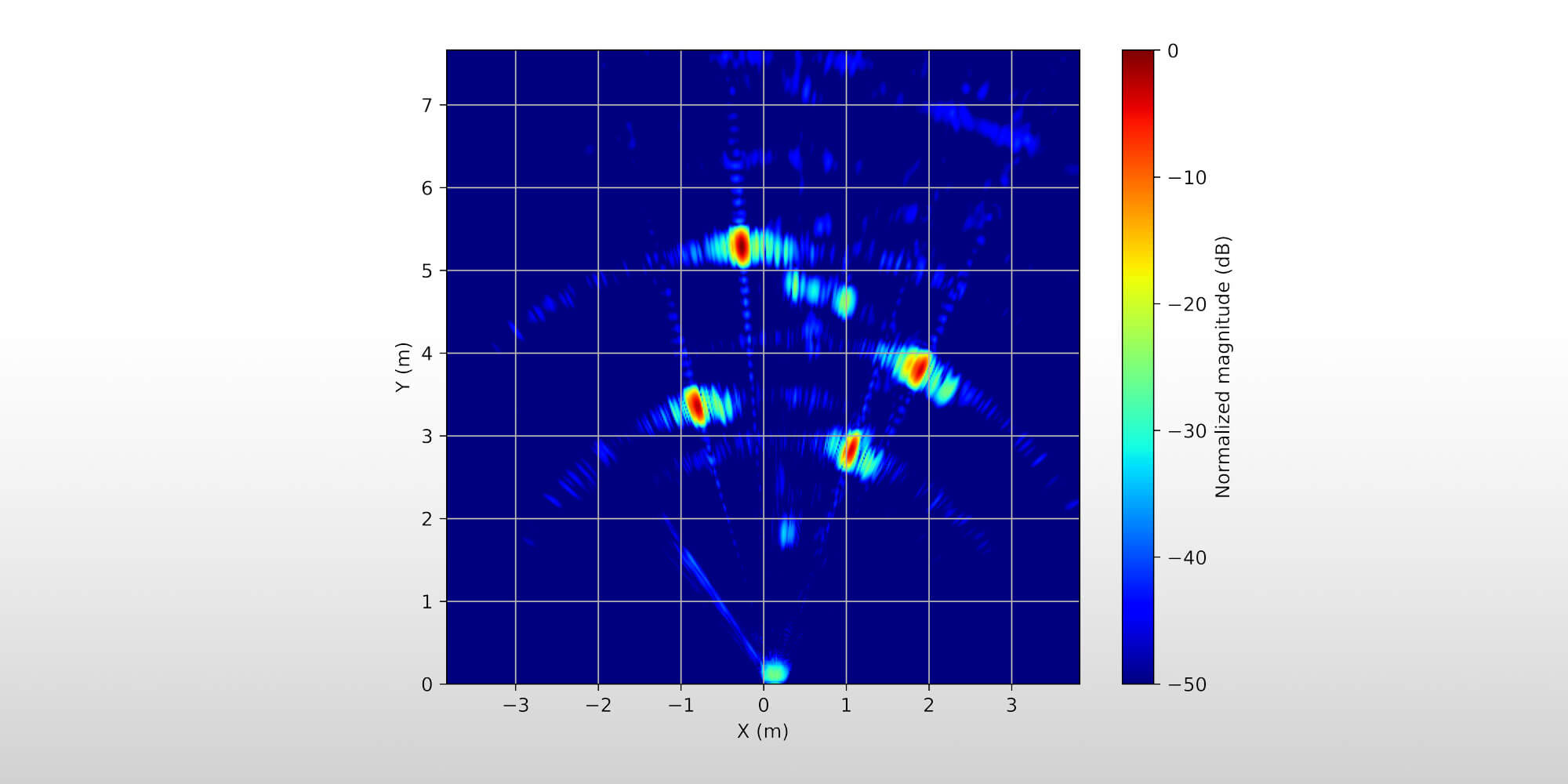
In the Magic Eye project, the coordinated movement of a quadruped robot is symbiotically combined with the measurement of millimeter-wave reflections in order to detect obstacles and hidden objects. By means of mathematical transformations and fusion of the data, an image of the environment with significantly higher resolution is created as a result of the virtual aperture created by the movement, from which the name SAR (Synthetic Aperture Radar) is derived. In connection with highly integrated radar sensors, it is to be expected that SAR as a symbiosis of measurement and movement will play an important role in radar-based path planning and map generation for highly automated driving in the future.
Andreas Stelzer: Andreas Stelzer graduated with honors sub auspiciis at JKU Linz. His research areas are RF-engineering and highly integrated radar sensor technology. He headed a Christian Doppler Research Lab on Integrated Radar Sensors and is currently involved in the JKU-LIT-SAL mm-Wave RF-Technologies Lab.
Andreas Müller: Andreas Müller is currently a Professor in robotics with at Johannes Kepler University, Linz. His current research interests include holistic modeling, model-based and optimal control of mechatronic systems, redundant robotic systems, parallel kinematic machines, biomechanics, and computational dynamics.
Reinhard Feger: Reinhard Feger is an Associate Professor at the Department for RF-Engineering, JKU. He likes to develop radar systems and then mount them on all kinds of things, especially if they are flying, driving or walking.
Hubert Gattringer: Hubert Gattringer is an Associate Professor with the Institute of Robotics, JKU. His research interests include modeling and control of flexible link/joint robotic systems and walking machines, optimal path planning, and kinematically redundant industrial robots.
Masoud Farhadi: Masoud Farhadi is working towards his PhD on synthetic aperture radars for highly automated driving at the Department for RF-Systems at JKU.
Robert Sturmlechner: Robert Sturmlechner is currently a research assistant with the Institute of Robotics, JKU. His major research interests include kinematics, dynamics, and trajectory planning for autonomous ground vehicles.
Richard Hüttner: Richard Hüttner is technician at the department for RF systems and involved in mechanical and electrical aspects of the demonstrator setup.
Credits
Project partners are the Institute for Communications Engineering and RF-Systems, Department RF-Systems (Prof. Stelzer), (www.nthfs.jku.at), and the Institute of Robotics (Prof. Müller), (www.jku.at/institut-fuer-robotik), and the JKU spin-off INRAS (www.inras.at).


