Inspirational Prototype of Precision Garden as a Possible Scenario for Sustainable Food Production
StellaVerde ist eine vertikale Gartenanlage, in der eine funktionale Verbindung zwischen Tieren, Pflanzen und Robotern es Pflanzen und Tieren (in diesem Fall Fischen) ermöglicht, Roboter je nach ihren Bedürfnissen zu nutzen. Das Projekt umfasst mehrere konzeptionelle Richtungen, die sich mit der zukünftigen Nahrungsmittelproduktion befassen. Eine davon ist UMSORGUNG durch die Interkognition und Interaktion von PFLANZE und MASCHINE, was mit einem besseren Verständnis der Pflanzen und Tiere, die das etablierte Kreislauf-Ökosystem bewohnen, verbunden ist.

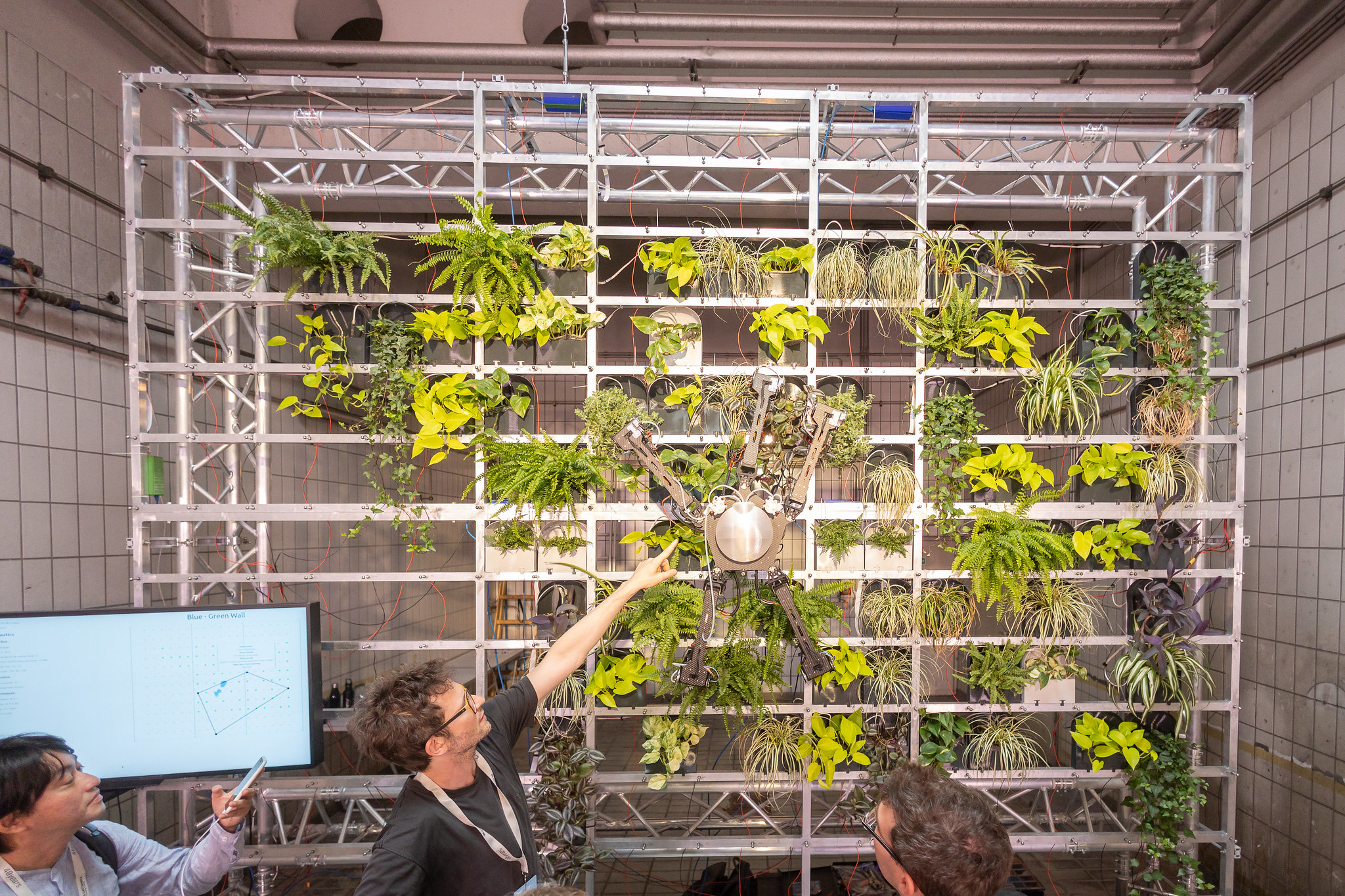
StellaVerde / Gregor Krpič (SI), Simon Gmajner (SI), Dr. Jan Babič (SI), Dr. Marko Jamšek (SI), Gal Sajko (Jožef Stefan Institute) (SI), Photo: Matjaž Rušt, Katja Goljat

StellaVerde / Gregor Krpič (SI), Simon Gmajner (SI), Dr. Jan Babič (SI), Dr. Marko Jamšek (SI), Gal Sajko (Jožef Stefan Institute) (SI), Photo: Matjaž Rušt, Katja Goljat
Durch den Einsatz einer umfassenden und ständig aktualisierten Reihe von Sensoren für Bodenfeuchtigkeit, Temperatur, Licht, Feuchtigkeit und Gase im Ökosystem sowie getrennten Pflanzen- und Fischbecken sind wir in der Lage, Pflanzen, die unter radikalen Bedingungen wachsen, entsprechend ihrer spezifischen individuellen Bedürfnisse radikal zu pflegen. Die Maschine, in diesem Fall ein fünfbeiniger Spiderbot, ein speziell entwickeltes Programm für seine Fortbewegung und ein Algorithmus für das Wohlbefinden der Pflanzen, interpretiert die Daten und setzt sie in eine Bewässerungsrout(in)e für den Spiderbot um.
Credits
Authors: Gregor Krpič and Simon Gmajner
Scientific collaborators: Dr. Jan Babič, Dr. Marko Jamšek, Gal Sajko (Jožef Stefan Institute)
Technical solutions: Uroš Mehle, Marsel Osmanagić, Andraž Tarman, Luka Žagar, Martin Konič, Jure Sajovic
Hands-on assistance: Nastja Ambrožič, Eva Debevc
Producer: Lea Lipnik
Innovation catalyst: Jurij Krpan, Kersnikova
The project development was supported by the European Commission – DG Connect, S+T+ARTS Regional Centers initiative.
The prototype solution was supported by the konS project, co-financed by the Republic of Slovenia and the European Regional Development Fund of the European Union.
This project is presented in the context of the More-than-Planet project co-funded by the Creative Europe Programme of the European Union.

Simon Gmajner (SI)
Simon Gmajner ist seit 15 Jahren im Kultursektor tätig, hauptsächlich als Projektentwickler und Produzent am Kersnikova Institut. Er entwickelt und leitet internationale Projekte im Bereich der zeitgenössischen investigativen Kunst, insbesondere der hybriden Kunst, und fördert die nationale und internationale transdisziplinäre Zusammenarbeit zwischen Kunst, Technologie und Wissenschaft. Seine Interessen liegen im Bereich der künstlerischen Erforschung lebender Systeme und der Ethik in der Arbeit mit lebenden Systemen in einem künstlerischen Kontext, die er in seiner Rolle als Koordinator des Vivarium (Labor für Pflanzen, Tiere und Roboter) am Kersnikova Institut umsetzt.

Gregor Krpič (SI)
Gregor Krpič studierte Elektronik an der Fakultät für Elektrotechnik der Universität von Ljubljana. Sein Interesse an Kunst, Musik und dem Design von (audio-)elektronischen Geräten führte ihn in den Bereich der Intermedia Art. Seit 2018 ist er aktiv an verschiedenen Forschungsprojekten für zeitgenössische Kunst mit Künstlerinnen wie Mojca Založnik (Boundary Indeterminacy, Kapelica Gallery, 2019) und Staš Vrenko (Separate Values, Eighth / for, 2021), Špela Petrič (Pl’AI, Kapelica Gallery, 2020), Zoran Srdić Janežič (Biobot, Kapelica Gallery, 2021), Brane Zorman (Duh Dreves | Touch, Zone, 2021), Tanja Vujinović (MetaVrt Sfera2, 2019), Januš Aleš Luznar (IctusCordis*, 2019), beteiligt, von denen sein vielleicht aufsehenerregendstes gemeinsam verfasstes Werk Boundary Uncertainty ist.