How can a person’s unique personality and essential character traits be captured, simulated and imparted to a robot?
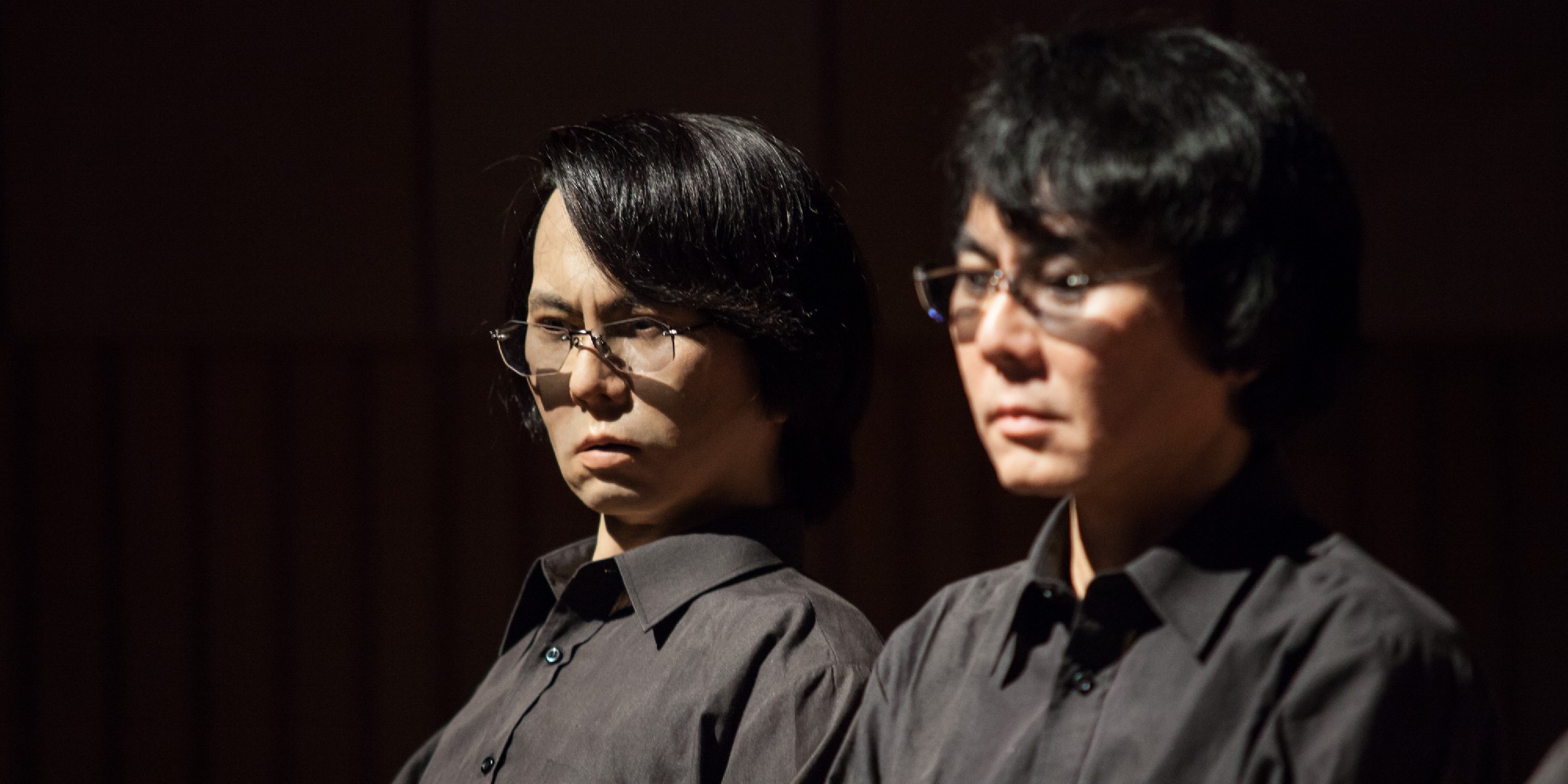
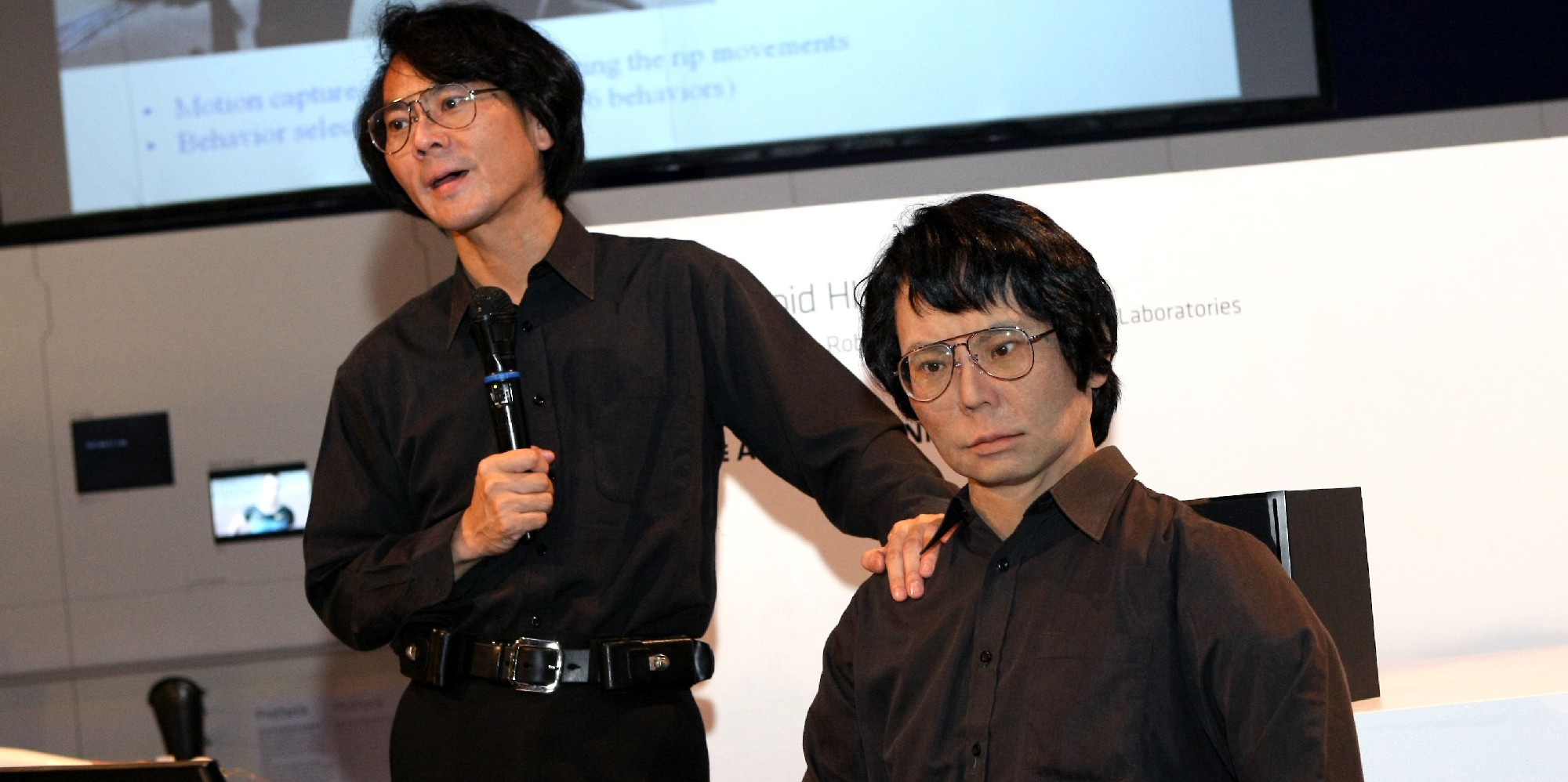
Hiroshi Ishiguro, professor at the University of Osaka and guest group leader at ATR Intelligent Robotics and Communication Laboratories, served as the model for HI-1, the very first geminoid. A geminoid is a robot created as a clone of an actual human being. The human-mechanical duo is linked together by innovative network & sensor technology, so the geminoid not only resembles its human model, it behaves like him too. Since 2009, Ars Electronica Futurelab and Prof. Ishiguro have collaborated together for unique projects, such as the Geminoid experiment in Café Cubus. Through these projects, we realize new forms of interactive installations and search for the social contextual robot.

Geminoid HI-1 @ AEC Future Dialogue photo: Emiko Ogawa

Featured Artist 2009 – Talk with Hiroshi Ishiguro moderated by Horst Hörtner photo: Rubra
Hiroshi Ishiguro & Geminoid photo: Rubra

Hiroshi Ishiguro (JP) / Geminoid HI-4 photo: Voggeneder

Geminoid HI-1 @ AEC photo: Emiko Ogawa

Geminoid @ Cubus photo: Emiko Ogawa
Equipped with 46 servomotors and various sensors, it’s one of the most complex robots ever built and is correspondingly difficult to transport. Accordingly, Ishiguro built a more mobile version, Geminoid HI-4. This lightweight model can converse with humans, and has 12 servomotors for facial expressions as well as eye and head movements. Ishiguro and Geminoid HI-4 are usually not at the same place at the same time. While one of the two is out delivering a speech somewhere, the other is at work, maybe in Japan. Or vice-versa.
Credits
Research & Development: ATR Intelligent Robotics and Communication Laboratories (Hiroshi Ishiguro) & Ars Electronica Futurelab (Hideaki Ogawa, Gerfried Stocker, Horst Hörtner, Erwin Reitböck)
PARTNER: ATR Intelligent Robotics and Communication Laboratories (Hiroshi Ishiguro)