
ORI*BOTICS, the art and science of robotic origami, ist ein fortlaufendes Forschungsprojekt, das die Verbindung von Origami, Technologie und Natur untersucht. Es baut auf neuartigen Methoden des Designs und der Herstellung von starkem, flexiblem und höchst unregelmäßigem Origami aus Textilien und 3D-Druck auf, insbesondere Fold Printing und Fold Mapping.
Diese Forschung beschäftigt sich mit den Besonderheiten von Origami-Robotern und gefalteten Mechanismen, einem neuen Bereich in Kunst und Wissenschaft mit vielen offenen Fragen. Unser Ziel ist es, das Wissen aus der Literatur – einschließlich neuer Ideen aus der Wissenschaft – zu erweitern, um neue Ansätze zu entwickeln, sowie praktische Hilfsmittel und Know-how für Ateliers zu erschaffen.
Wir erforschen drei grundlegende Problembereiche: Programmierung, Transformation und Sensorik.
- Die Programmierung von Origami-Formen erfordert theoretisches, praktisches und mathematisches Wissen darüber, wie Origami-Muster in der Natur entstehen und wie sie ihre Form verändern können. Unser Ziel ist es, eine neue Software zu entwickeln, die es Künstler*innen ermöglicht, neue Origami-Robotik-Designs zu erstellen. Wir verwenden eine Open-Source-Methode mit öffentlichem Zugang, um neue und bestehende Werkzeuge für computergestütztes Origami zu entwickeln und zusammenzustellen.
- Die Transformation einer Origami-Roboterform erfordert intelligente Materialien und komplexe digitale Fabrikationstechniken. Unser experimenteller Ansatz zielt darauf ab, aktuelles Wissen zu neuen Verfahren zu kombinieren, mit denen Kunstschaffende und Wissenschaftler*innen ihre Origami-Roboter herstellen und bewegen können. Wir wollen Methoden finden, mit denen eine Faltung auf wiederholbare und dauerhafte Weise bewegt werden kann, damit diese sich für die Werkstattproduktion eignet.
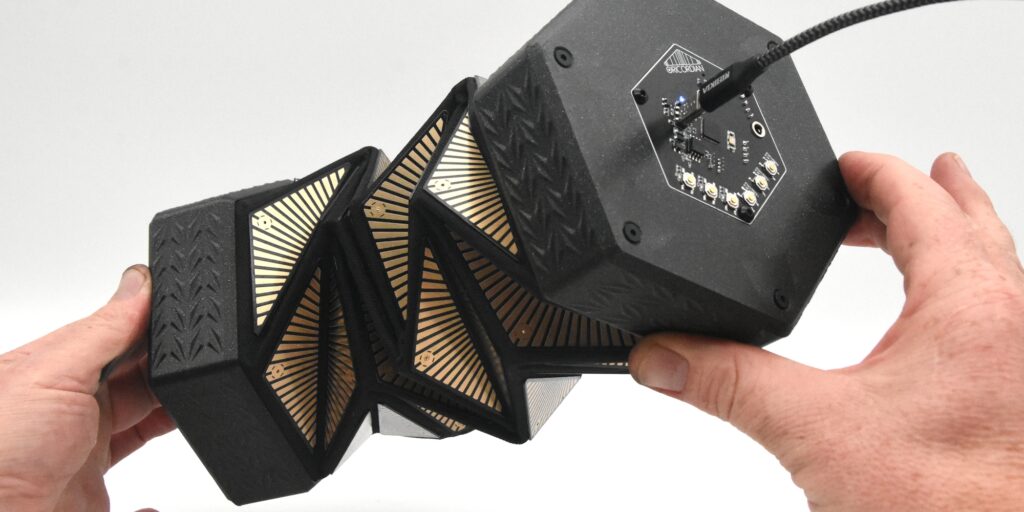
- Die Sensorik in Origami bietet kontinuierliche und binäre Optionen, die viele verschiedene Arten menschlicher Interaktionen ermöglichen, wie z. B. skulpturale, musikalische und leistungsbasierte Prototypen. Wir suchen nach einer Multimateriallösung auf der Grundlage bestehender Methoden, die Flexibilität und elektrische Eigenschaften auf komplexen Origami-Mustern vereinen kann.


Die Forschungsmethodik ist in vier Kategorien unterteilt:
- Künstlerische Wissenschaft: unser Prozess der Literaturanalyse und experimentellen Überprüfung.
- Forschung durch Herstellung: Herstellung von Prototypen und neuartigen Methoden, wie zum Beispiel haptische, taktile und physische Prototypen. Diesen wird gleiche Bedeutung geschenkt wie konzeptionellen Rahmenbedingungen und wissenschaftlichen Veröffentlichungen.
- Open-Source & Open Call: Zusammenführung von Fachwissen anderer weltweit führender Forschungsgruppen.
- Forschung durch Lehre: Dazu gehören Workshops, öffentliche Präsentationen, Ausstellungen, Online-Videos und von Fachleuten geprüfte Publikationen.
Die Präsentation unserer Ergebnisse in Form von praktischen, haptischen, taktilen und physischen Prototypen hat den gleichen Stellenwert wie konzeptionelle Grundlagen, Literaturberichte und Veröffentlichungen. Öffentliche Präsentationen und Engagement werden durch Ausstellungen, Workshops und Online-Videos erreicht.
Die Forschung wird im Ars Electronica Futurelab in Linz durchgeführt. Die Öffentlichkeitsarbeit erfolgt in Zusammenarbeit mit dem Ars Electronica Festival und dem Ars Electronica Center. Ein Team mit künstlerischer und wissenschaftlicher Expertise wird von Oribotiker Matthew Gardiner geleitet.
Credits
Team:
Project Key Researcher and Lead: Matthew Gardiner
Project researchers: Anna Weiss, Erwin Reitböck, Simon Schmid
Former researchers: Arno Deutschbauer, Georgios Tsampounaris
Project Advisor: Hideaki Ogawa
Partner:
Gefördert vom Österreichischen Wissenschaftsfonds FWF, PEEK-Programm
Studio Matthew Gardiner https://orilab.art