
Soft Collision (2024) untersucht das Potenzial für sichere physische Interaktionen, indem Kollisionen nicht vermieden, sondern bereitwillig angenommen werden. Eine verformbare pneumatische Membran, die direkt gesteuert und in Echtzeit angepasst werden kann, macht die Interaktion intuitiver und inklusiver. Die intensive Zusammenarbeit zwischen Künstlerin und technischen Partnern war entscheidend, um über konventionelle industrielle Interaktionsprotokolle hinaus zu einer materialorientierten Form der Robotik zu gelangen.
Basierend auf den Erkenntnissen aus fünf europäischen Pilotprojekten mit Industrierobotern wurde im Rahmen des Projekts Soft Collision eine Membran entwickelt, die verschiedene Funktionen erfüllen kann. Sie enthält flexible Sensoren, die Bewegungen des Roboters direkt steuern und in Echtzeit anpassen können. Die Morphologie der Luftkanäle erhöht den Angebotscharakter und sorgt dafür, dass sich Menschen in der Nähe des Roboters sicher fühlen.

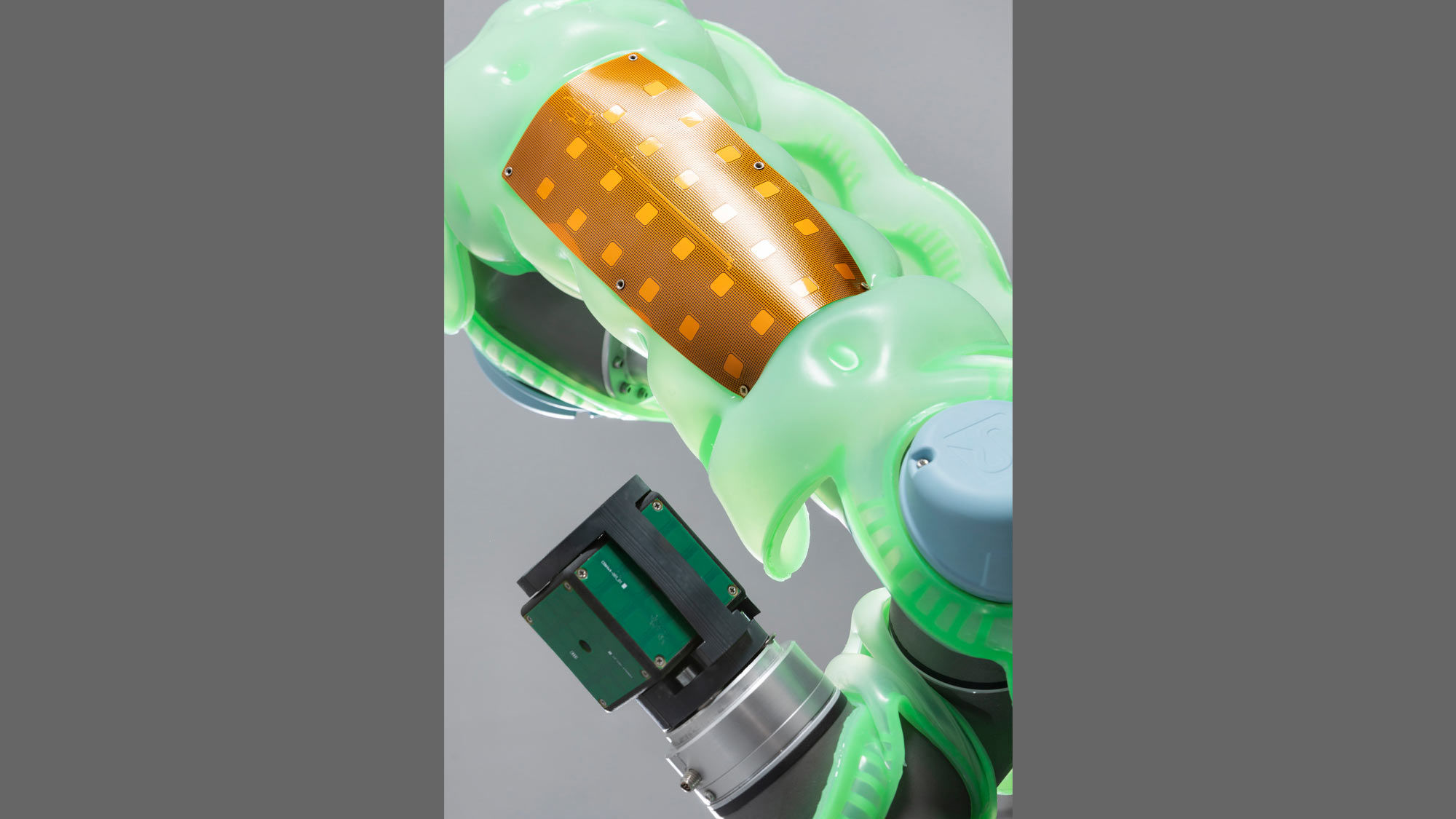
Soft Collision, Membrane placed on UR5, photo: Michelle Mantel
Soft Collision, photo: Michelle Mantel

Soft Collision, Performance with the membrane, photo: Michelle Mantel
Die Membran ist so konstruiert, dass sie den komplexen Torsionsbewegungen des sechsachsigen Roboters folgt. Ihr flexibles Material ermöglicht es dem Roboter, sich bei Kollisionen nahtlos an die physische Umgebung anzupassen. Zwei zusätzliche Luftkammern an der Basis der Membran werden durch kurze Stöße aktiviert und dienen als eine Form der nonverbalen Kommunikation, um Feedback über die empfangenen Inputs zu geben.
Inspiriert von der natürlichen Welt und verschiedenen biologischen Bewegungen, beispielsweise von Raupen, strebt dieses Design eine subtile Veränderung in der Art und Weise an, wie wir Roboter betrachten und mit ihnen interagieren.
Bio
-
 Photo: Michelle Mantel
Photo: Michelle MantelAnna Schaeffner
FR
Anna Schaeffner (FR) ist Interaktionsdesignerin und forscht im Rahmen einer praxisorientierten Promotion an der École nationale supérieure des Arts Décoratifs in Paris und im Exzellenzcluster „Matters of Activity“ in Berlin im Bereich der Mensch-Computer-Interaktion. Ihr Forschungsschwerpunkt liegt auf dem Design formbarer Materialien. In ihrer Designpraxis untersucht sie greifbare Interaktion als Vehikel für Bewegungsprogrammierung, dynamische Materialanpassung und Ausdruckskraft.
Credits
Artist: Anna Schaeffner
Performer: Michela Filzi
VOJEXT S+T+ARTS Art Residence 3: Social Robots
Residence lead by VOJEXT PARTNERS: Fondazione Istituto Italiano Di Tecnologica (IIT), Universdidad Politécnica de Madrid (UPM), Universidad Nebrija (UNNE) and WAAG
The UR5 is kindly provided by Grand Garage, an education and innovation workshop for people, knowledge, and technology, located in the Tabakfabrik Linz. The GRAND GARAGE is part of TGW Future Wings, the social entrepreneurship division within the TGW world.
This project has received funding from the European Union’s Horizon 2020 research and innovation program under the Grant Agreement no.952197. Supported by The Cluster of Excellence »Matters of Activity. Image Space Material« Berlin.
Presented in the context of the LABEL4FUTURE project. LABEL4FUTURE is funded by the European Union (European Innovation Council and SMEs Executive Agency (EISMEA) under grant agreement No. 101133162).