The systems we create at the Ars Electronica Futurelab visualize, sonify, sense, learn and co-create. We work with all kinds of display, projection, and sound technologies, with virtual & extended reality, AI, robots and drones, brain-computer interfaces, and biotechnology.
Futurelab R&D Highlights:
At the Futurelab, we combine technology with scientific methodologies and artistic exploration. In exchange with society, we seek future questions and new knowledge.
Our internal competition of ideas creatively explores the technological and social circumstances of our time – culminating in unique projects and patented technology.

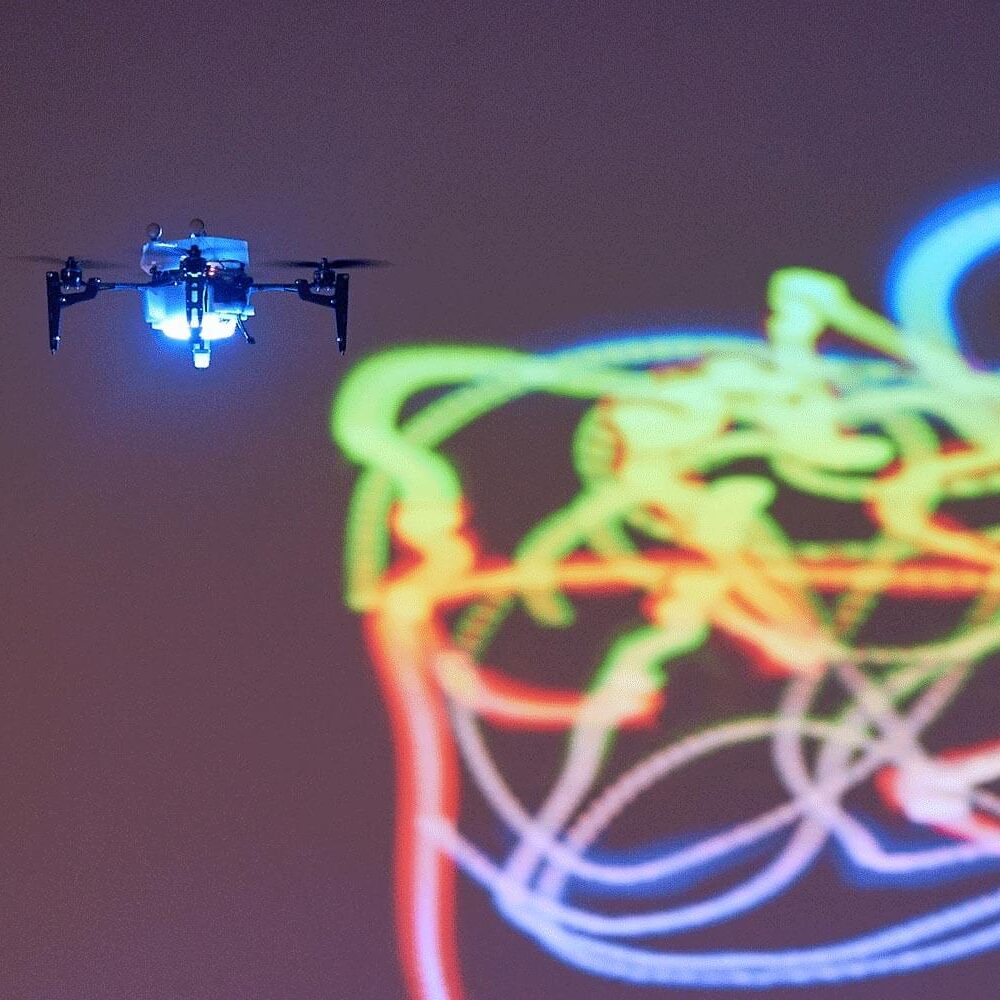
With Spaxels, the Futurelab invented drone art and has since continuously pushed the boundaries – with our swarmOS, human swarm interaction research, and the integration of ground vehicles.
Research and Development in conjunction with prototyping at the Ars Electronica Futurelab means playfully exploring technological potential and designing systems that combine cutting-edge components into a whole: shaped by our artistic vision and always greater than the sum of its parts. With this approach, we have been active in pioneering work for over 25 years now – from drone art to creative AI, from collective experience spaces to emotional ink and origami robotics.
Highlights
Developed by the Futurelab, Deep Space 8K is one of the world’s most exciting digital experience spaces with 33 million pixels, stereoscopic 3D and a high-performance tracking system.
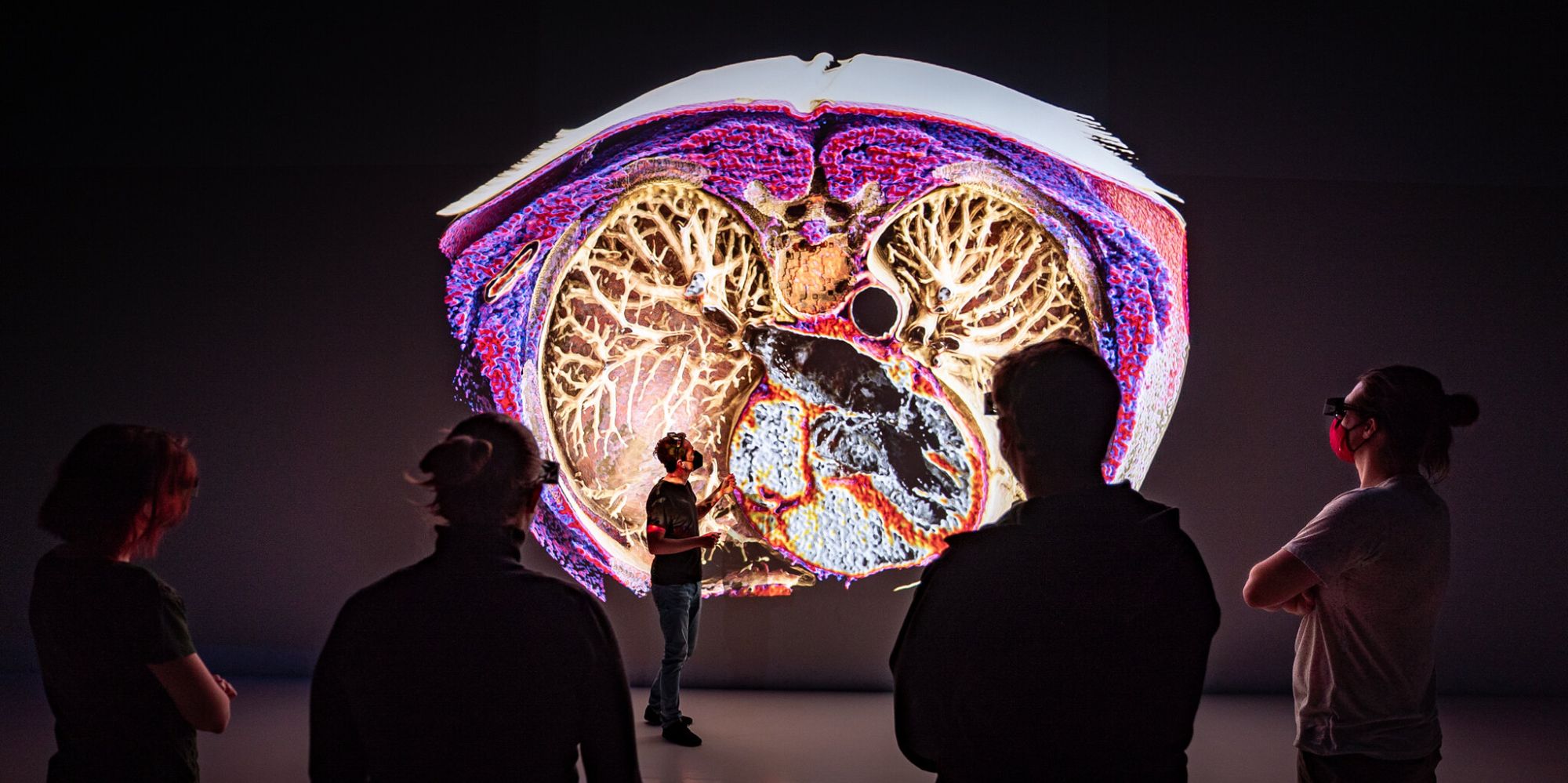
Multiple award-winning innovation that merges MRI and CTR data of real patients into photorealistic 3D images: viewed larger than life in Deep Spaces as razor-sharp objects from all angles.
The invention of drone shows and swarm art performances: Futurelab premiered the world’s first large-scale outdoor formation drone flight and has expanded the concept continuously since then.
Supporting manufacturing companies in Austria in matters of digital transformation in the fields of digital design, digital production, cyber security and artificial intelligence.
Interactive AI-based music composition system where human users and the AI system discover the potential of a musical idea in a collaborative way.

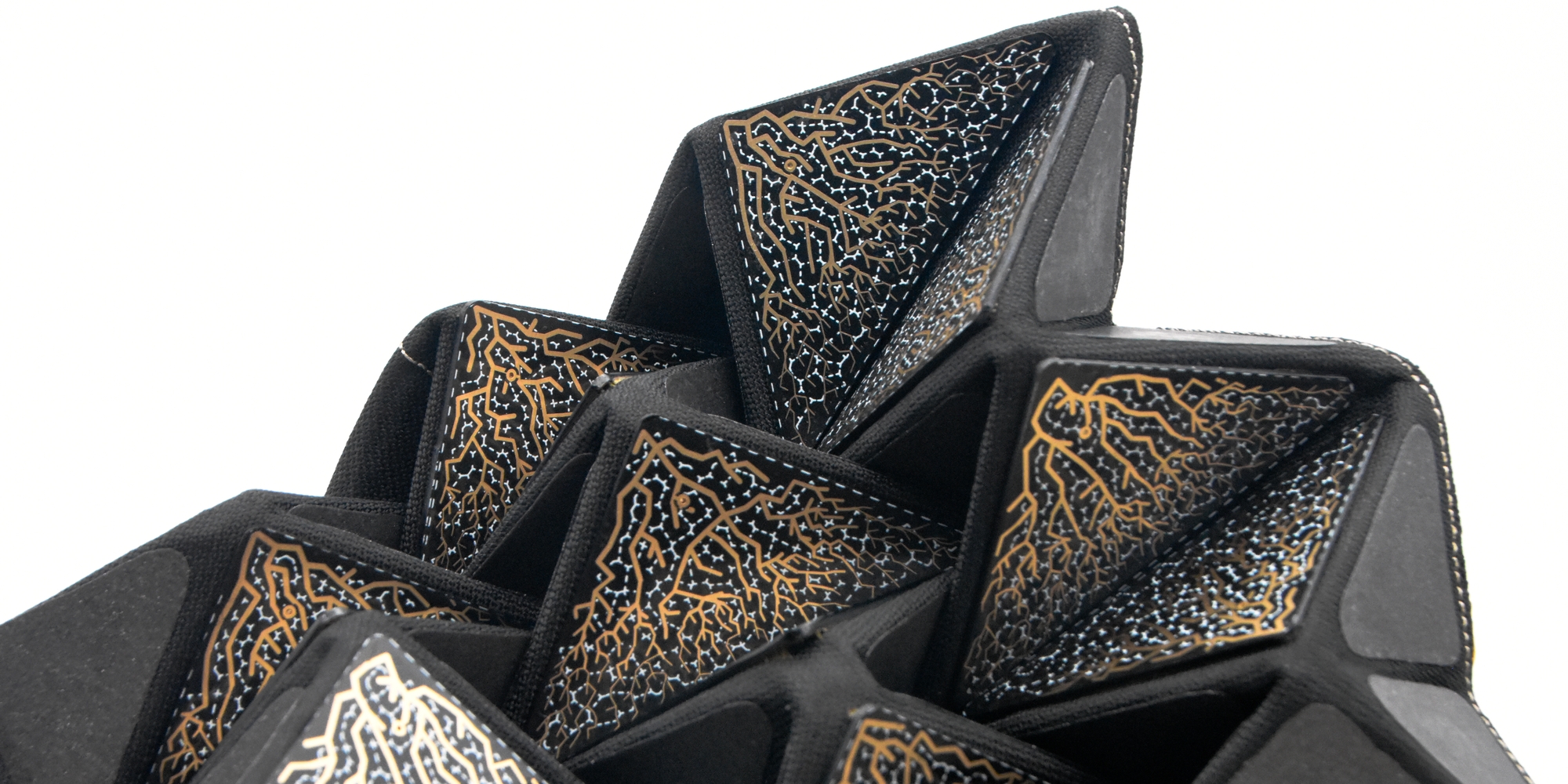
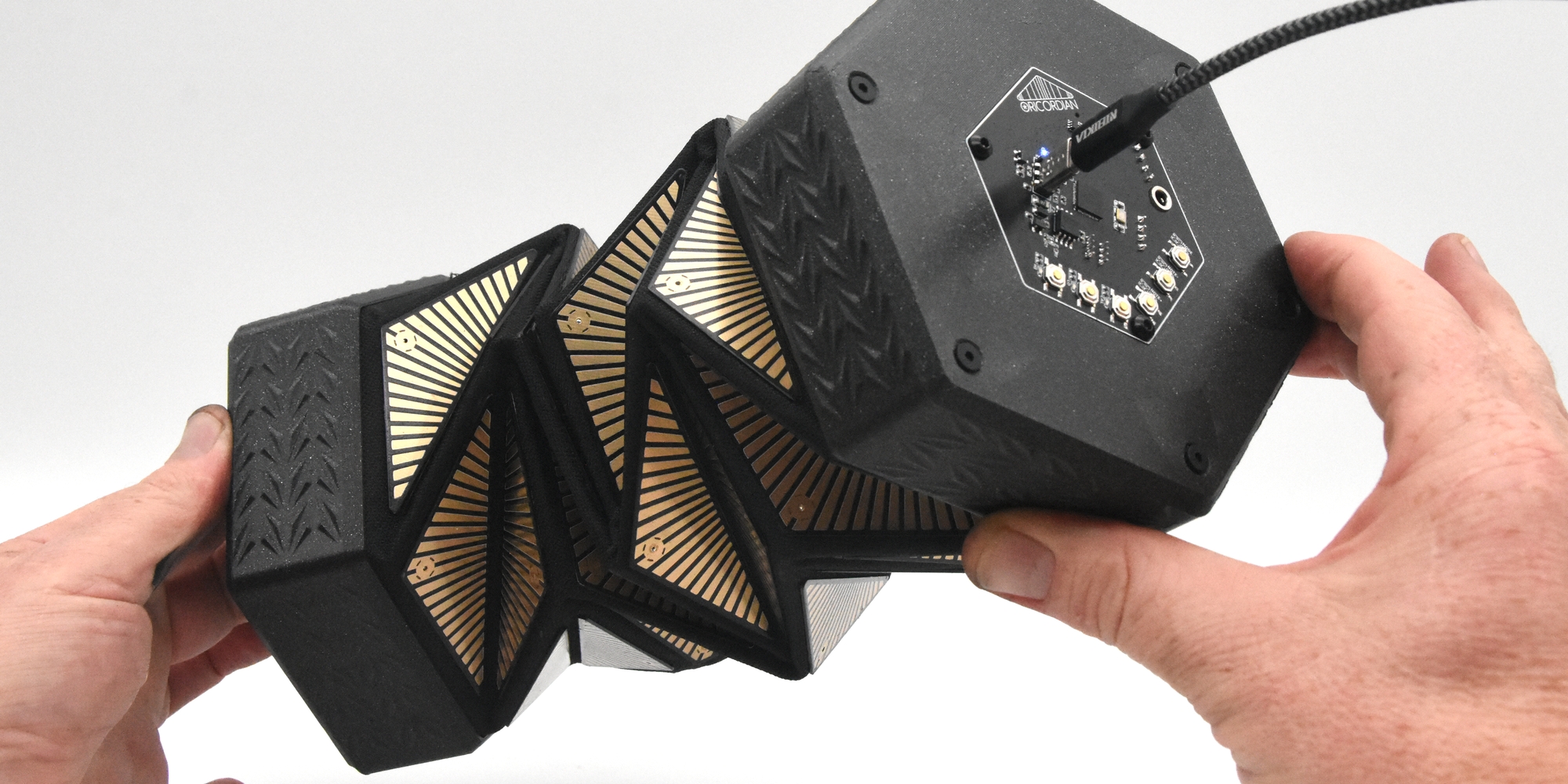
Exploration of the art and science of robotic origami to design and produce strong, flexible, and highly irregular origami from textiles and 3D printing.

Interactive application for Deep Space 8K to experiment with psychological and physiological processes by exploring visitors’ heartbeats.

Immersive audio and visual experience in Deep Space 8K, created through the interaction between artificial intelligence and biological entities.

Collaborative project of seven Austrian research institutions to develop new standards for successful communication and teamwork between humans and robots.
The Futurelab’s research is most visible through our exhibits, installations, performances; through the images and sounds you encounter – and how you perceive our projects, how they impact your experience and your thoughts. We create environments for exploring science and technology through play; data art that becomes part of the architecture of public spaces; and performances that weave together the latest sensor technology and music or dance. All of this can only be created in a process led by continuous research and prototyping.

We try, revise, change, adapt, improve and sometimes completely re-do our work, recognizing that embracing the truly new requires a willingness to take risks and delve into unexpected outcomes. This spirit of exploration resonates within our team. Each Futurelab member has deep knowledge in particular areas but is driven by an unquenchable curiosity that extends beyond their core fields.
Our projects are driven by artistic imagination so we normally do not invent technologies to create new “products” but rather employ, extend, and bend those that pique our interest. However, on occasion, there are gaps between the already possible and our vision. In such cases, we create the layers of technology that we require – and may arrive at something completely new that has a wide impact.
Photo: Intel Corporation
Inventing Drone Swarms and Deepening Space
The most famous example of inventing a new technology is perhaps our work on swarms+art. With it, the world’s first drone swarm light show, Spaxels, premiered in 2012 and has since inspired millions of people with countless adaptations all around the globe. In the course of the swarms+art project, we created a whole ecosystem to control drone swarms with swarmOS as well as a new type of robot swarm, called Fluxels.
The Futurelab is also active in pioneering work revolving around creative AI: Ricercar, a composition system for classical music, provides unique opportunities to researchers as well as composers and musicians in general to explore musical ideas together with an AI companion.


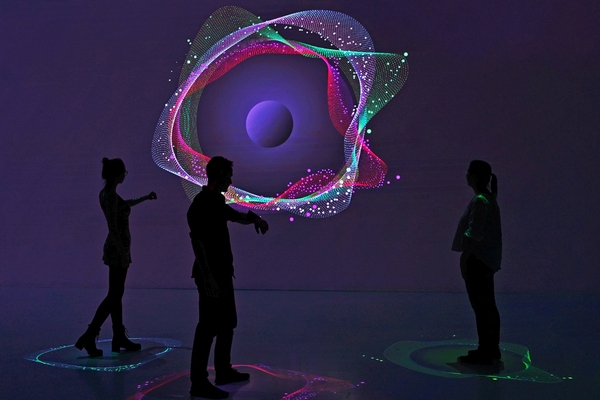
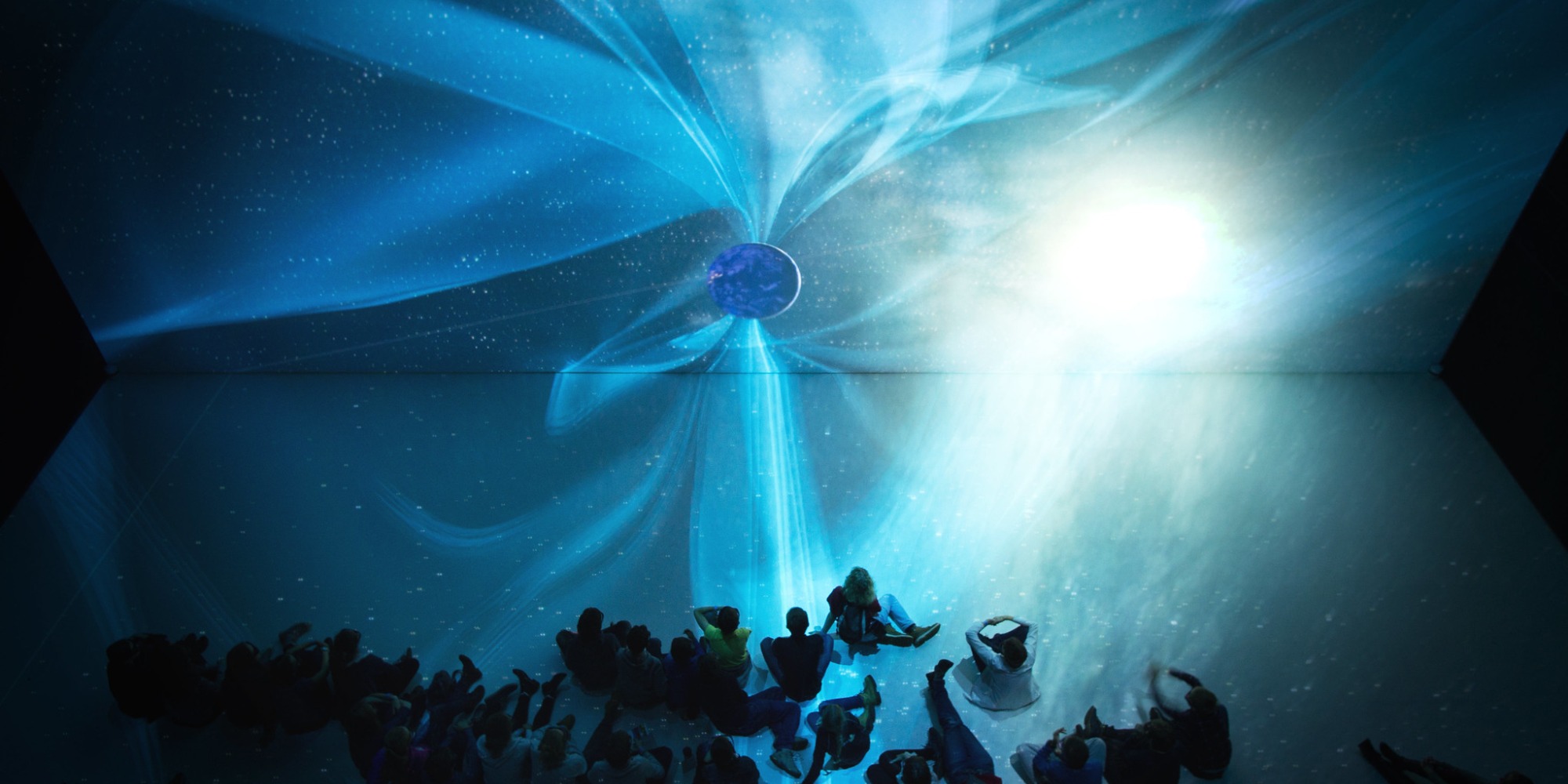
Another outstanding outcome is the Deep Space 8K at the Ars Electronica Center – developed, built, and constantly expanded by the Ars Electronica Futurelab. Deep Space 8K is a worldwide unique immersive experience space for large visitor groups that offers 8K resolution with 33 million pixels in stereoscopic 3D on a stunning 16-by-9-meter wall and equally large floor projection. Even large groups of guests can be tracked in 3D, using the Futurelab’s own pharus tracking system.
The visitors go on exceptional journeys together – be it to conduct a world-class orchestra, to play a game discussing climate change, or to dive into the middle of the human body or the vastness of space. The Deep Space 8K has since been exported to Shanghai, Mexico, and Switzerland by our colleagues at Ars Electronica Solutions – proving the wide range of possible applications as well as the universal appeal of this immersive space.
Photo: Ars Electronica – Robert Bauernhansl
Medical Novelty and Visions of Ink
Some of our works have a very direct relation to scientific discovery and discourse, like the JKU medSPACE which has been awarded several international innovation prizes. It is built to display the Cinematic Anatomy x Deep Space software that the Ars Electronica Futurelab developed in collaboration with Johannes Kepler University (JKU) Linz, based on medical software by Siemens Healthineers.
The JKU medSpace is a unique infrastructure at the Medical University Linz where teachers and students can explore the human anatomy using “Cinematic Anatomy x Deep Space”. Data of real patients is displayed here in larger-than-life 4K projection in quadruple stereoscopic 3D: with photorealistic three-dimensional images, razor-sharp from all angles and seamlessly zoomable.

Another project developed through continuous R&D and long-term collaboration is our Future Ink research with Wacom. The latest evolution, Life Ink, captures brainwaves and body signals in real time to create a new form of three-dimensional immersive ink that expresses our emotions and creative moments. In Space Ink, we combined our vast experience with drones to envision a future where we can draw in any space with a drone and a digital pen – from light painting to creating vast paper canvases. Another part of the project was Bio Ink to develop living ink that grows freely beyond human input.
An additional unique research project in the Futurelab is Oribotics: a discipline of engineering that combines origami and robotics in new ways, funded by a prestigious national research grant. Here, we explore novel methods for designing and making strong, flexible and highly irregular robotic origami. The latest development are Oribotic Instruments – robotic sculptures where fold angles are captured in real time to create spatialized musical expression.