Die im Ars Electronica Futurelab entwickelten Systeme visualisieren, klingen, spüren, lernen und ko-kreieren. Wir arbeiten mit allen Arten von Display-, Projektions- und Soundtechnologien, mit virtueller und erweiterter Realität, KI, Robotern und Drohnen, Gehirn-Computer-Schnittstellen und Biotechnologie.
Futurelab F&E-Highlights:
Im Futurelab verbinden wir Technologie mit wissenschaftlichen Methoden und künstlerischer Erforschung. Im Austausch mit der Gesellschaft suchen wir nach Zukunftsfragen und neuem Wissen.
Unser interner Ideenwettbewerb setzt sich kreativ mit den technologischen und gesellschaftlichen Gegebenheiten unserer Zeit auseinander – das Ergebnis sind einzigartige Projekte und patentierte Technologien.

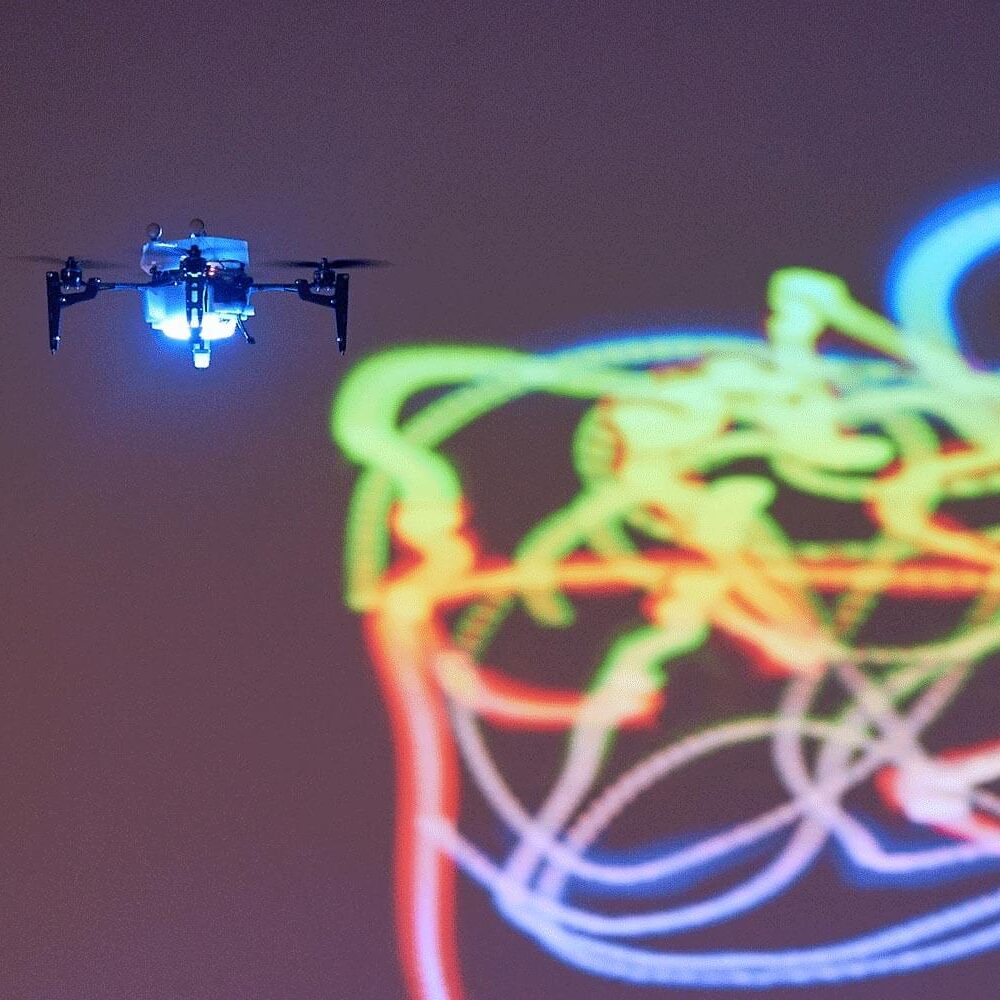
Mit Spaxels hat das Futurelab die Drohnenkunst erfunden und seither die Grenzen immer weiter verschoben – mit unserem swarmOS, der Erforschung der Interaktion zwischen Mensch und Schwarm und der Einbindung von Bodenfahrzeugen.
Forschung und Entwicklung in Verbindung mit Prototyping im Ars Electronica Futurelab bedeutet, spielerisch technologische Potenziale zu erforschen und Systeme zu entwerfen, die modernste Komponenten zu einem Ganzen verbinden: geprägt von unserer künstlerischen Vision und immer größer als die Summe seiner Teile. Mit diesem Ansatz leisten wir seit über 25 Jahren Pionierarbeit – von Drohnenkunst bis zu kreativer KI, von kollektiven Erlebnisräumen bis zu emotionaler Tinte und Origami-Robotik.
Highlights
Der vom Futurelab entwickelte Deep Space 8K ist einer der aufregendsten digitalen Erlebnisräume der Welt mit 33 Millionen Pixeln, stereoskopischem 3D und einem leistungsstarken Tracking-System.
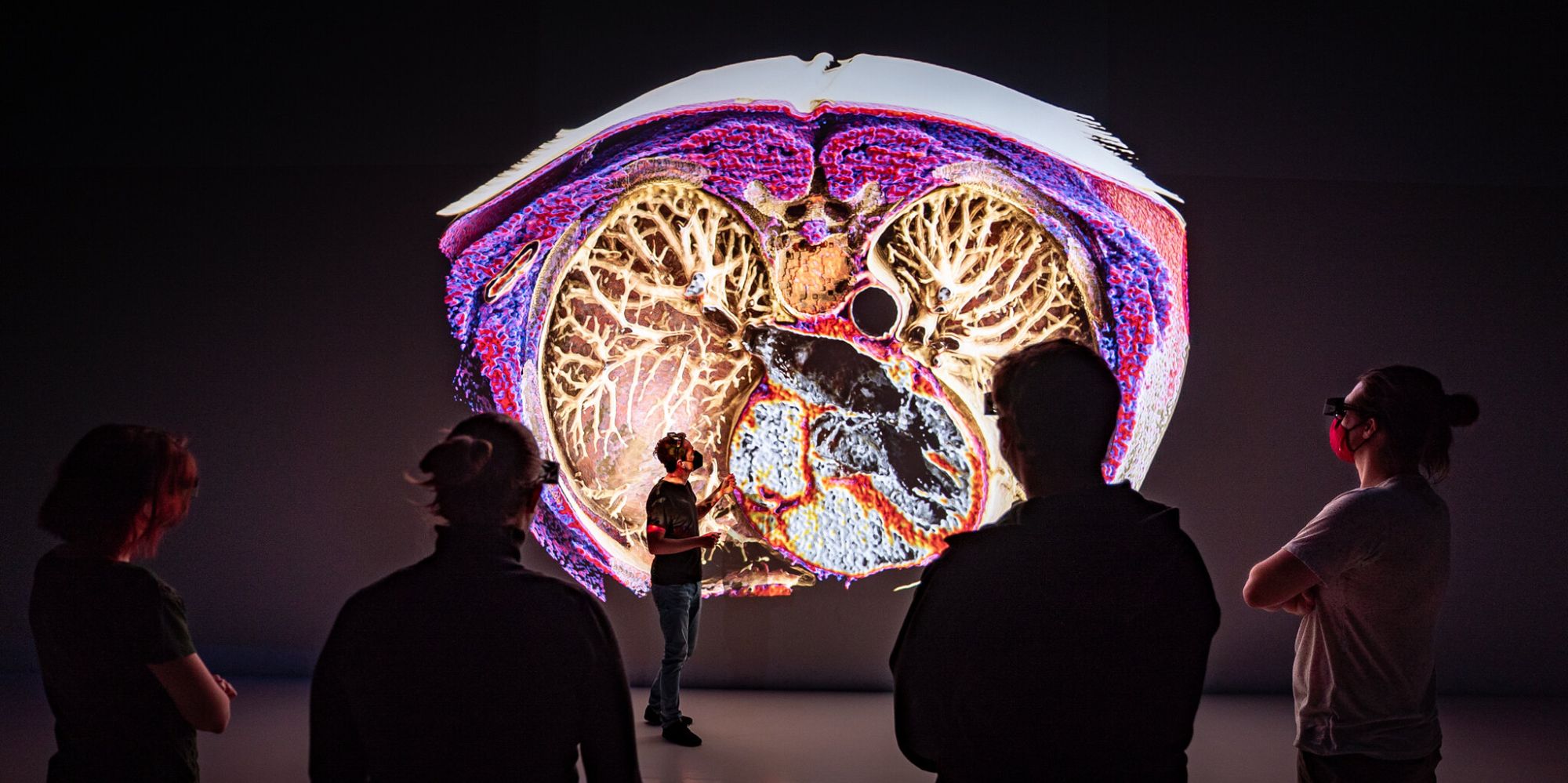
Mehrfach preisgekrönte Innovation, die MRT- und CT-Daten echter Patient*innen zu fotorealistischen 3D-Bildern zusammenführt: in Deep Spaces überlebensgroß als gestochen scharfe Objekte aus jedem Blickwinkel.
Die Erfindung von Drohnenshows und Schwarmkunst-Performances: Das Futurelab hat den weltweit ersten groß angelegten Formationsflug von Drohnen aufgeführt und das Konzept seither kontinuierlich erweitert.
Unterstützung für produzierende Unternehmen in Österreich in Fragen der digitalen Transformation in den Bereichen digitales Design, digitale Produktion, Cybersicherheit und künstliche Intelligenz.
Interaktives KI-gestütztes Musikkompositionssystem, bei dem menschliche Nutzer*innen und das KI-System gemeinsam das Potenzial einer musikalischen Idee entdecken.

Erforschung der Kunst und Wissenschaft des robotischen Origami, um starke, flexible und unregelmäßige Origami aus Textilien und 3D-Druck zu entwerfen und herzustellen.

Interaktive Anwendung für den Deep Space 8K zum Experimentieren mit psychologischen und physiologischen Prozessen durch Erkundung des Herzschlags der Besucher*innen.

Immersives auditives und visuelles Erlebnis im Deep Space 8K, das durch die Interaktion zwischen künstlicher Intelligenz und biologischen Wesen entsteht.

Gemeinschaftsprojekt von sieben österreichischen Forschungseinrichtungen zur Entwicklung neuer Standards für eine erfolgreiche Kommunikation und Teamarbeit zwischen Mensch und Roboter.
Die Forschung des Futurelab wird am deutlichsten durch unsere Ausstellungen, Installationen und Performances, durch die Bilder und Klänge, denen Sie begegnen – und durch die Art und Weise, wie Sie unsere Projekte wahrnehmen, wie diese Ihre Erfahrungen und Gedanken beeinflussen. Wir schaffen Umgebungen, in denen Wissenschaft und Technologie spielerisch erkundet werden können. Datenkunst, die Teil der Architektur des öffentlichen Raums wird. Performances, die neueste Sensortechnologie mit Musik oder Tanz verweben. All dies kann nur in einem Prozess entstehen, der von kontinuierlicher Forschung und Prototyping geleitet wird.

Wir probieren aus, überarbeiten, verändern, passen an, verbessern und machen unsere Arbeit manchmal ganz neu. Denn wir wissen, dass man Risiken eingehen und sich auf unerwartete Ergebnisse einlassen muss, wenn man sich auf wirklich Neues einlassen will. Dieser Forschergeist spiegelt sich auch in unserem Team wider. Jedes Mitglied des Futurelab verfügt über fundierte Kenntnisse in bestimmten Bereichen, wird aber auch von einer unstillbaren Neugierde angetrieben, die über seine Fachgebiete hinausgeht.
Unsere Projekte werden von künstlerischer Vorstellungskraft angetrieben, daher erfinden wir normalerweise keine Technologien, um neue „Produkte“ zu schaffen, sondern verwenden, erweitern und überarbeiten diejenigen, die unser Interesse wecken. Gelegentlich gibt es jedoch Lücken zwischen dem bereits Möglichen und unserer Vision. In solchen Fällen schaffen wir die von uns benötigten Technologieebenen – und kommen so möglicherweise zu etwas völlig Neuem, das weite Kreise zieht.
Photo: Intel Corporation
Drohnenschwärme und die Vertiefung des Raums
Das berühmteste Beispiel für die Erfindung einer neuen Technologie ist vielleicht unsere Arbeit an swarms+art. Mit ihr wurde 2012 die weltweit erste Drohnenschwarm-Lichtshow, Spaxels, uraufgeführt und hat seither Millionen von Menschen mit unzähligen Adaptionen rund um den Globus inspiriert. Im Zuge des swarms+art-Projekts haben wir ein ganzes Ökosystem zur Steuerung von Drohnenschwärmen mit swarmOS sowie eine neue Art von Roboterschwarm, genannt Fluxels, geschaffen.
Das Futurelab leistet auch Pionierarbeit im Bereich der kreativen KI: Ricercar, ein Kompositionssystem für klassische Musik, bietet sowohl Forscher*innen als auch Komponist*innen und Musiker*innen im Allgemeinen einzigartige Möglichkeiten, musikalische Ideen gemeinsam mit einem KI-Begleiter zu erforschen.


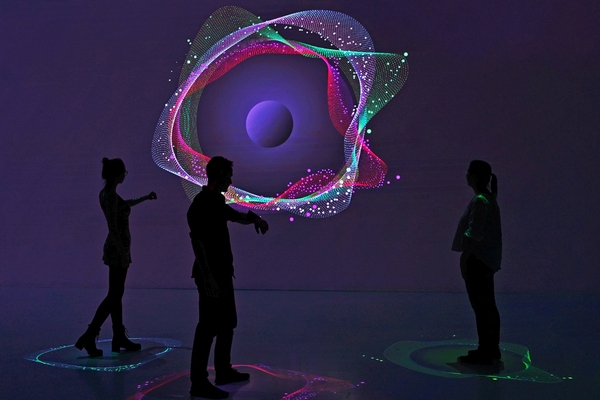
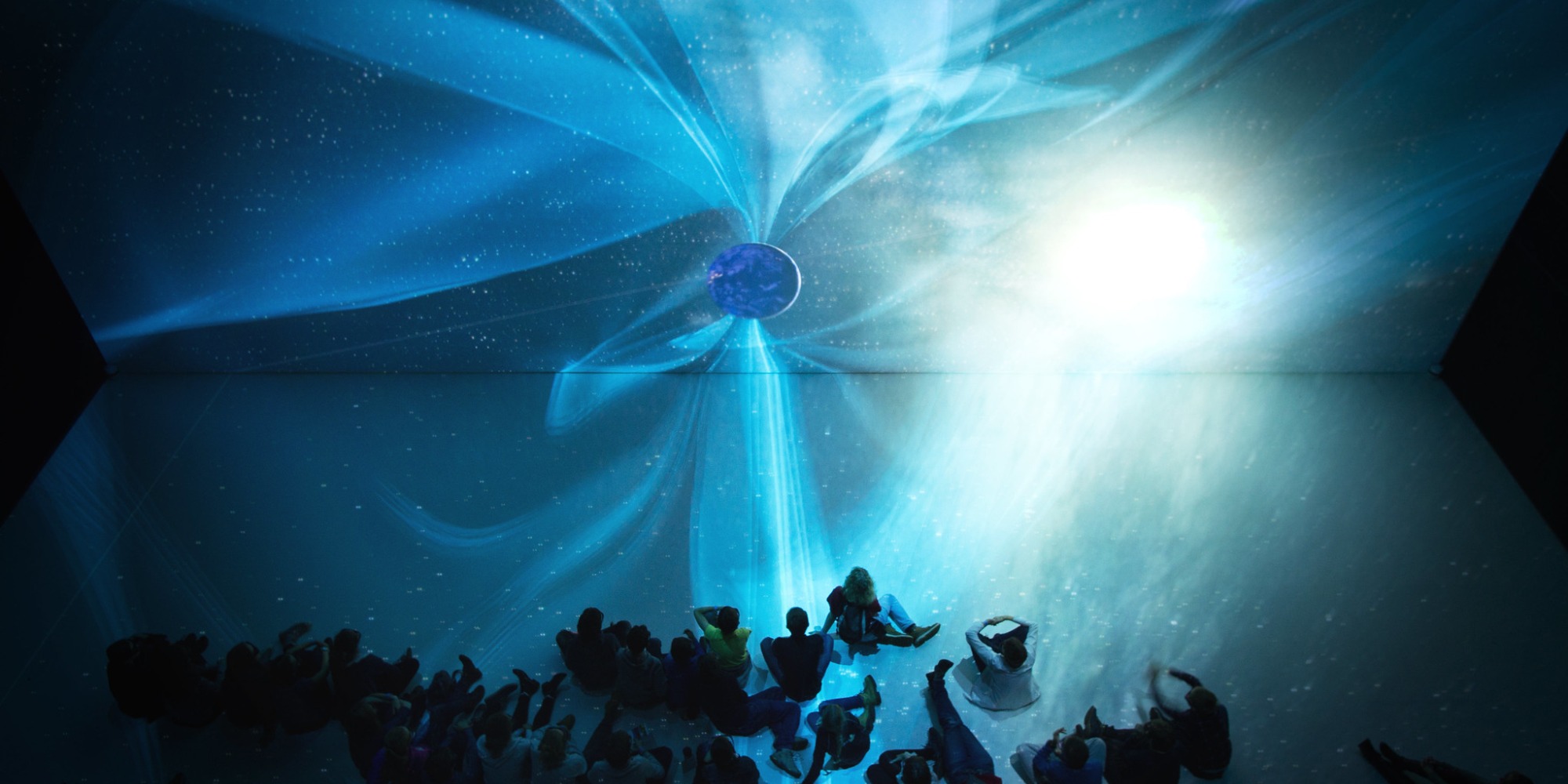
Ein weiteres herausragendes Ergebnis ist der Deep Space 8K im Ars Electronica Center – entwickelt, gebaut und ständig erweitert vom Ars Electronica Futurelab. Der Deep Space 8K ist ein weltweit einzigartiger immersiver Erlebnisraum für große Besuchergruppen: Er bietet 8K-Auflösung mit 33 Millionen Pixeln in stereoskopischem 3D auf einer beeindruckenden 16 mal 9 Meter großen Wand und einer ebenso großen Bodenprojektion. Selbst große Gruppen können mit dem Futurelab-eigenen pharus Tracking-System in 3D verfolgt werden.
Die Besucher*innen begeben sich gemeinsam auf außergewöhnliche Reisen – sei es, um ein Weltklasse-Orchester zu dirigieren, ein Spiel zum Thema Klimawandel zu erleben, in das Innere des menschlichen Körpers oder in die Weiten des Weltraums einzutauchen. Der Deep Space 8K wurde inzwischen von unseren Kolleg*innen von Ars Electronica Solutions nach Shanghai, Mexiko und in die Schweiz exportiert – ein Beweis für die vielfältigen Einsatzmöglichkeiten und die universelle Anziehungskraft dieses immersiven Raums.
Photo: Ars Electronica – Robert Bauernhansl
Medizinische Neuheit und Visionen von Tinte
Einige unserer Arbeiten haben einen sehr direkten Bezug zu wissenschaftlichen Erkenntnissen und Diskursen, wie der JKU medSPACE, der mit mehreren internationalen Innovationspreisen ausgezeichnet wurde. Es dient zur Darstellung der Software „Cinematic Anatomy x Deep Space“, die das Ars Electronica Futurelab in Zusammenarbeit mit der Johannes Kepler Universität (JKU) Linz entwickelt hat – basierend auf medizinischer Software von Siemens Healthineers.
Der JKU medSpace ist eine einzigartige Infrastruktur an der Medizinischen Universität Linz, in der Lehrende und Studierende anhand von „Cinematic Anatomy x Deep Space“ die menschliche Anatomie erforschen. Daten von realen Patient*innen werden hier in überlebensgroßer 4K-Projektion in vierfach stereoskopischem 3D dargestellt: mit fotorealistischen dreidimensionalen Bildern, gestochen scharf aus allen Blickwinkeln und nahtlos zoombar.

Ein weiteres Projekt, das durch kontinuierliche Forschung und Entwicklung und langfristige Zusammenarbeit entwickelt wurde, ist unsere Future-Ink-Forschung mit Wacom. Die neueste Entwicklung, Life Ink, erfasst Gehirnströme und Körpersignale in Echtzeit und schafft damit eine neue Form von dreidimensionaler, immersiver Tinte, die unsere Emotionen und kreativen Momente zum Ausdruck bringt. In Space Ink haben wir unsere umfassende Erfahrung mit Drohnen zusammengeführt, um uns eine Zukunft vorzustellen, in der wir mit einer Drohne und einem digitalen Stift an jedem beliebigen Ort zeichnen können – von Lichtmalerei bis hin zur Gestaltung riesiger Papierleinwände. Ein weiterer Teil des Projekts war Bio Ink zur Entwicklung von lebender Tinte, die ohne menschliches Zutun wächst.
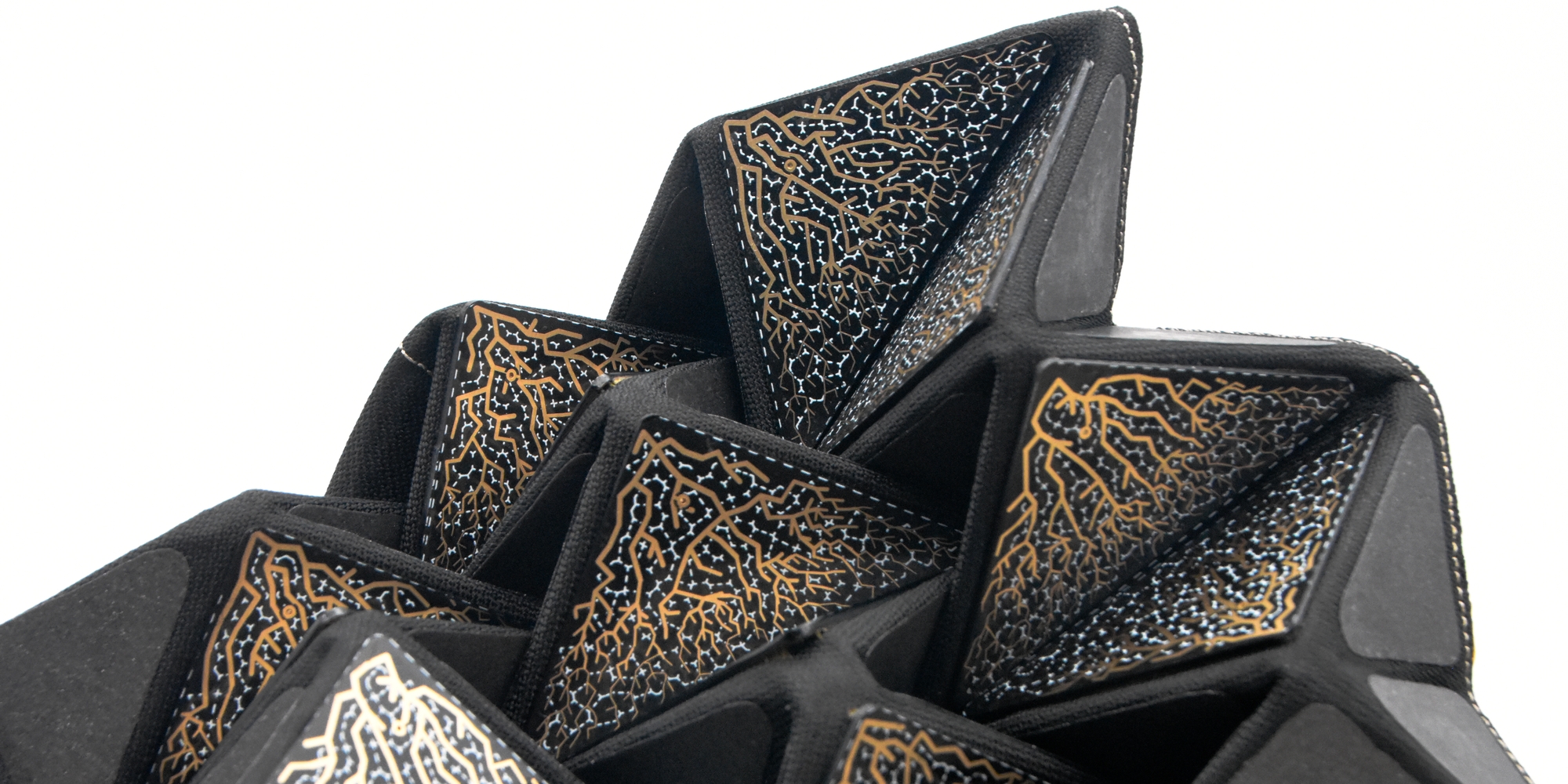
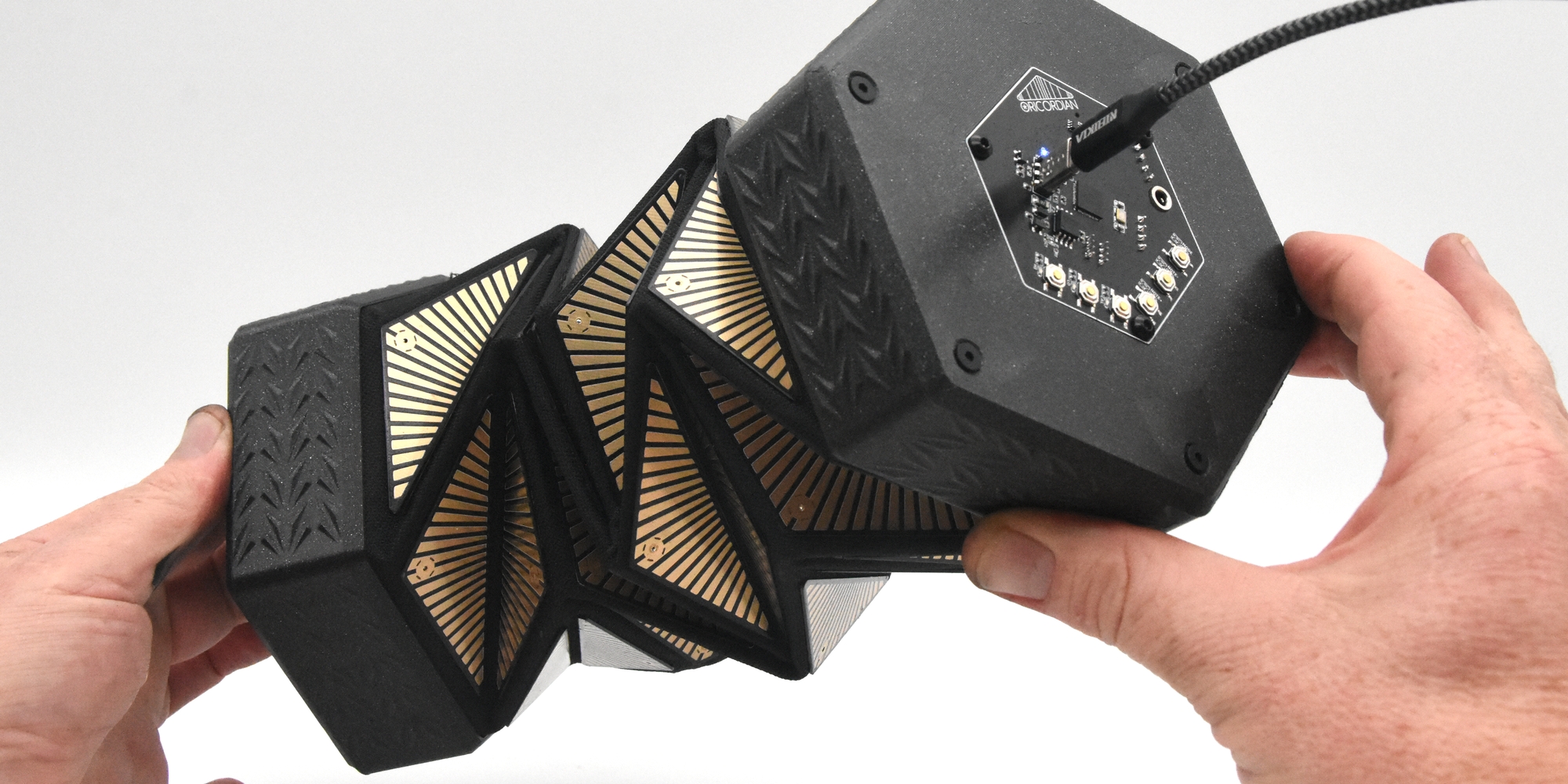
Ein weiteres einzigartiges Forschungsprojekt im Futurelab ist Oribotics: eine Ingenieursdisziplin, die Origami und Robotik auf neue Art und Weise kombiniert und durch ein angesehenes nationales Forschungsstipendium finanziert wird. Hier erforschen wir neuartige Methoden für den Entwurf und die Herstellung starker, flexibler und höchst unregelmäßiger robotischer Origami. Die neueste Entwicklung sind Oribotic Instruments – Roboter-Skulpturen, bei denen die Faltwinkel in Echtzeit erfasst werden, um einen räumlichen musikalischen Ausdruck zu erzeugen.